
Technical Portfolio
Click "View Details" for expanded gallery with zoom • Navigate images with arrows • Red video icon indicates demo video
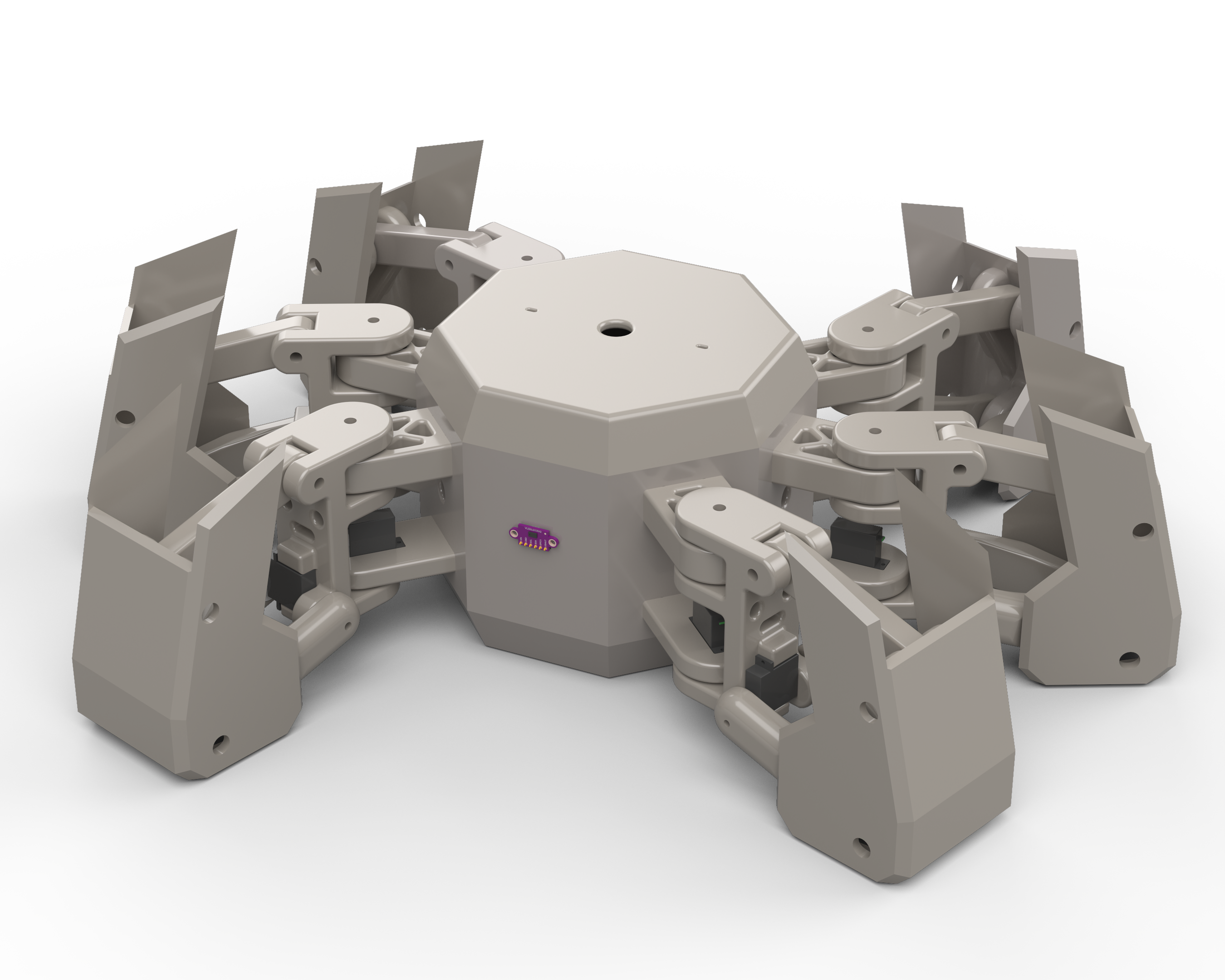
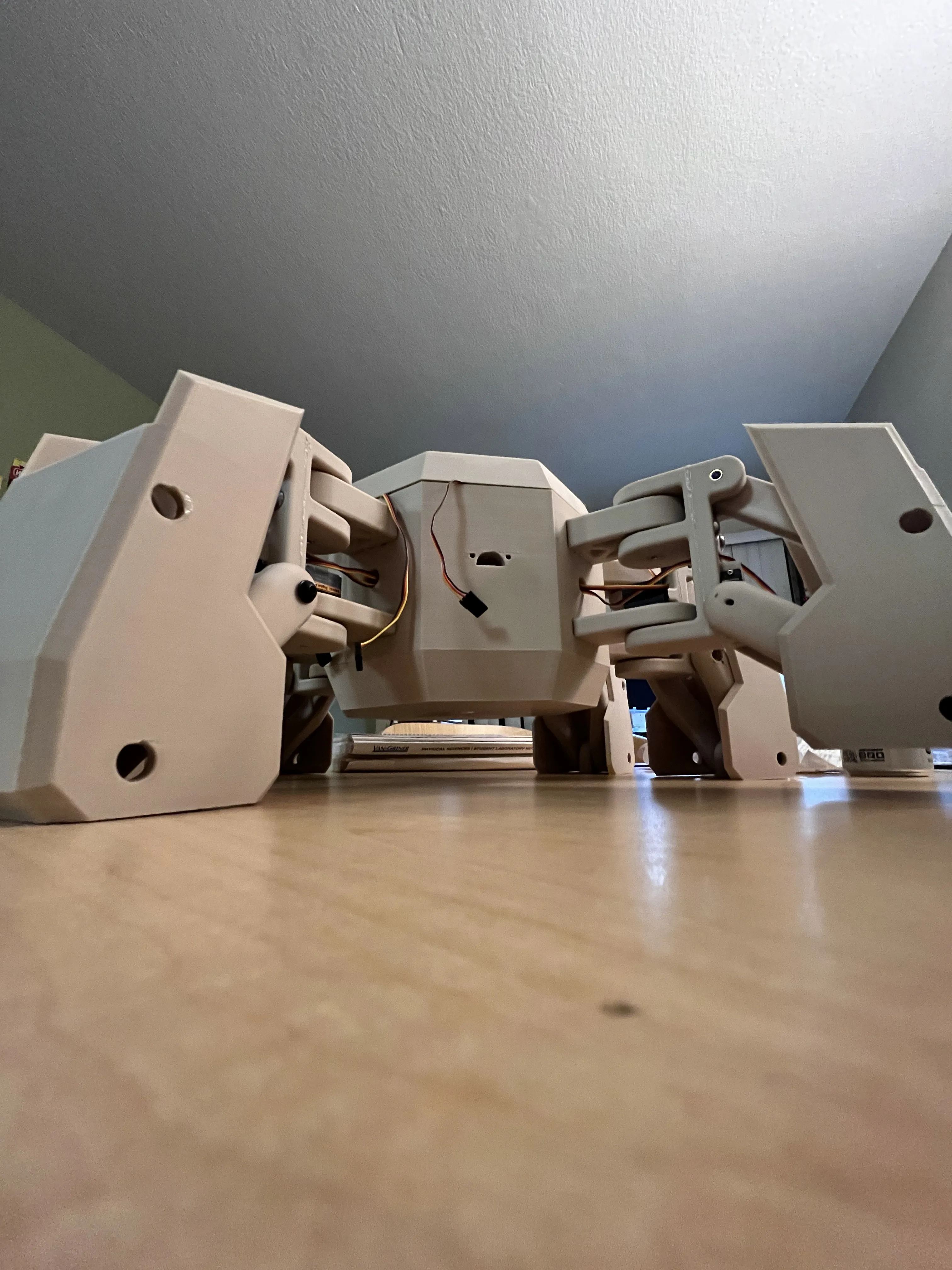
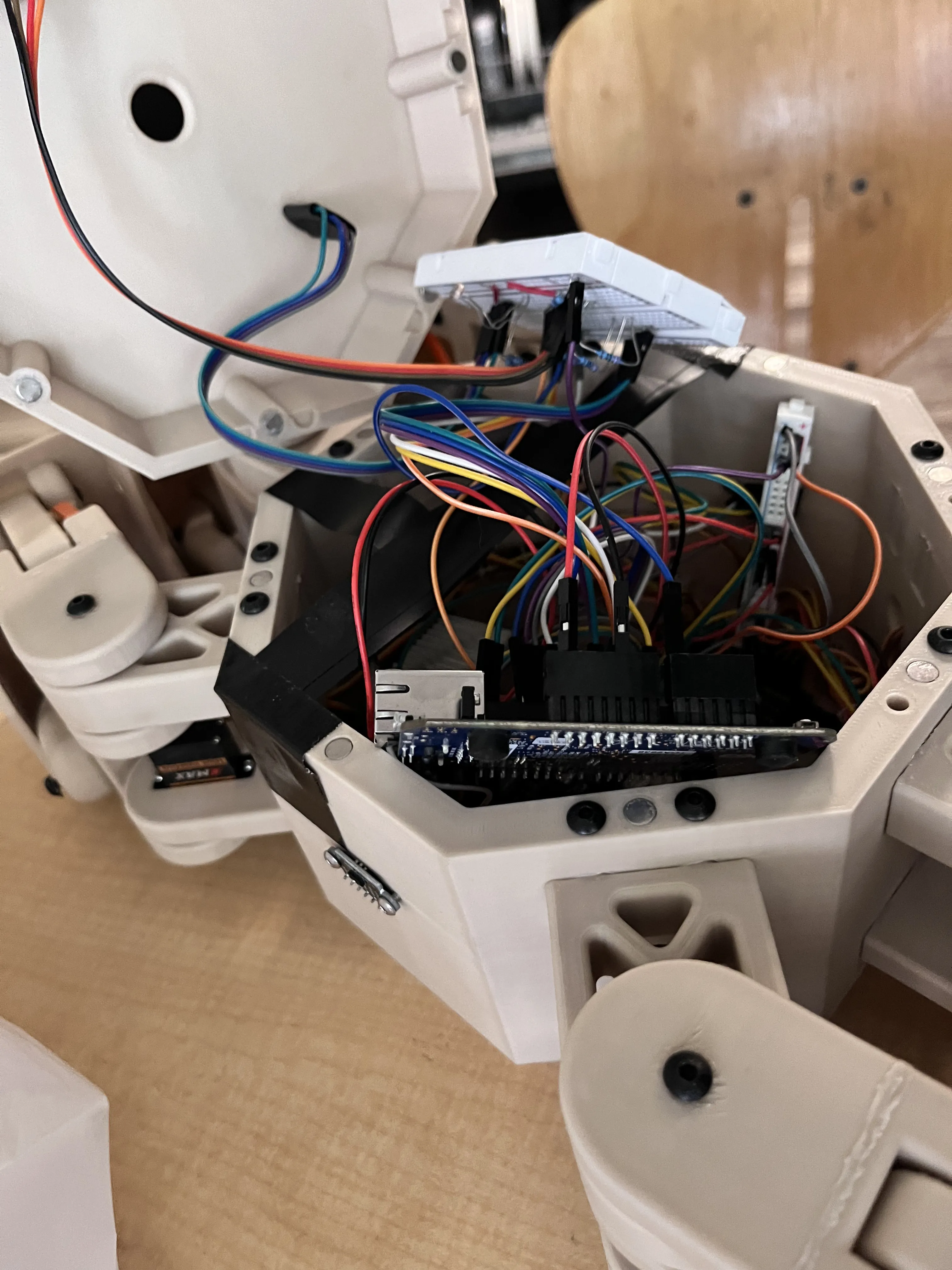
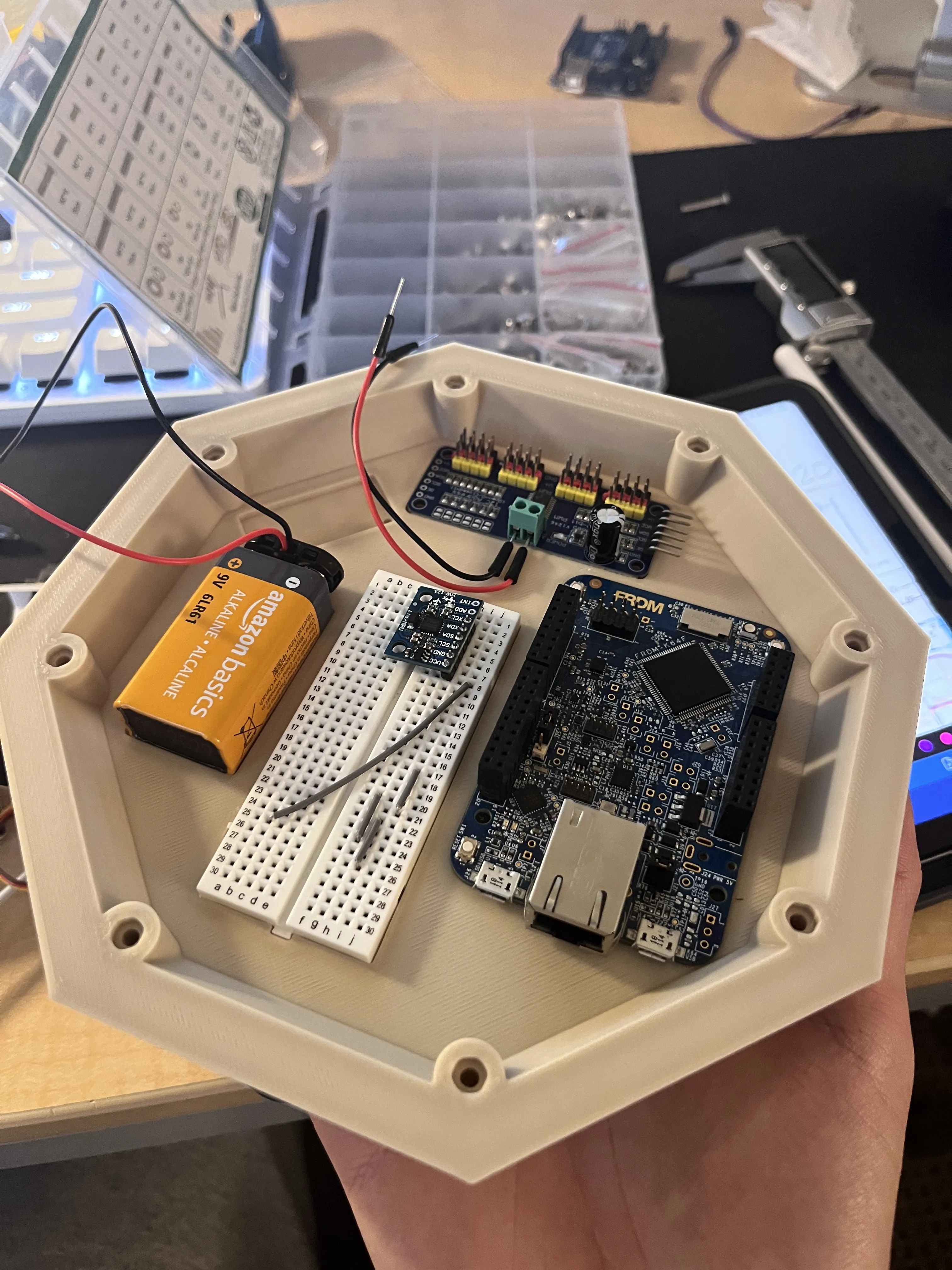
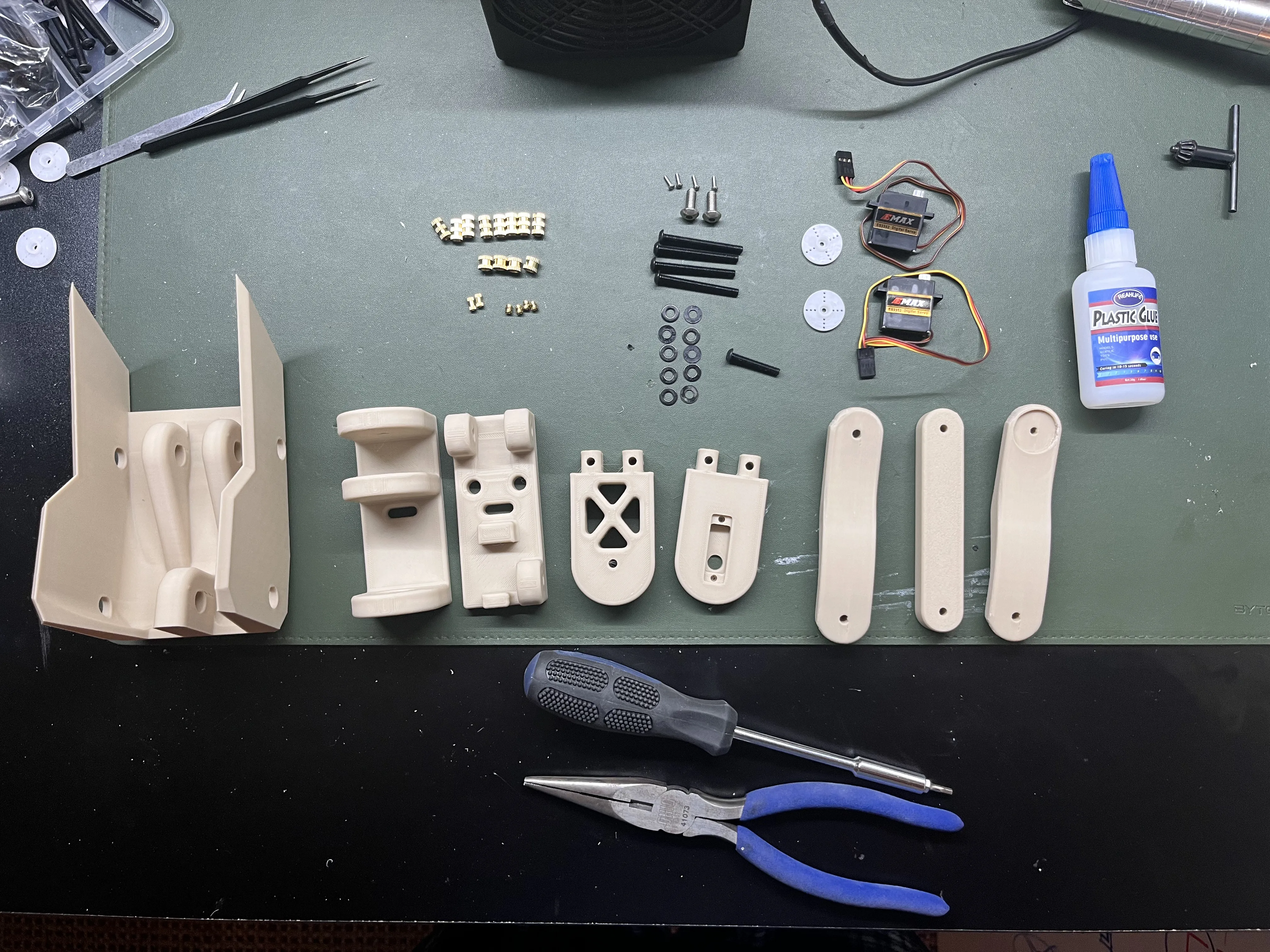
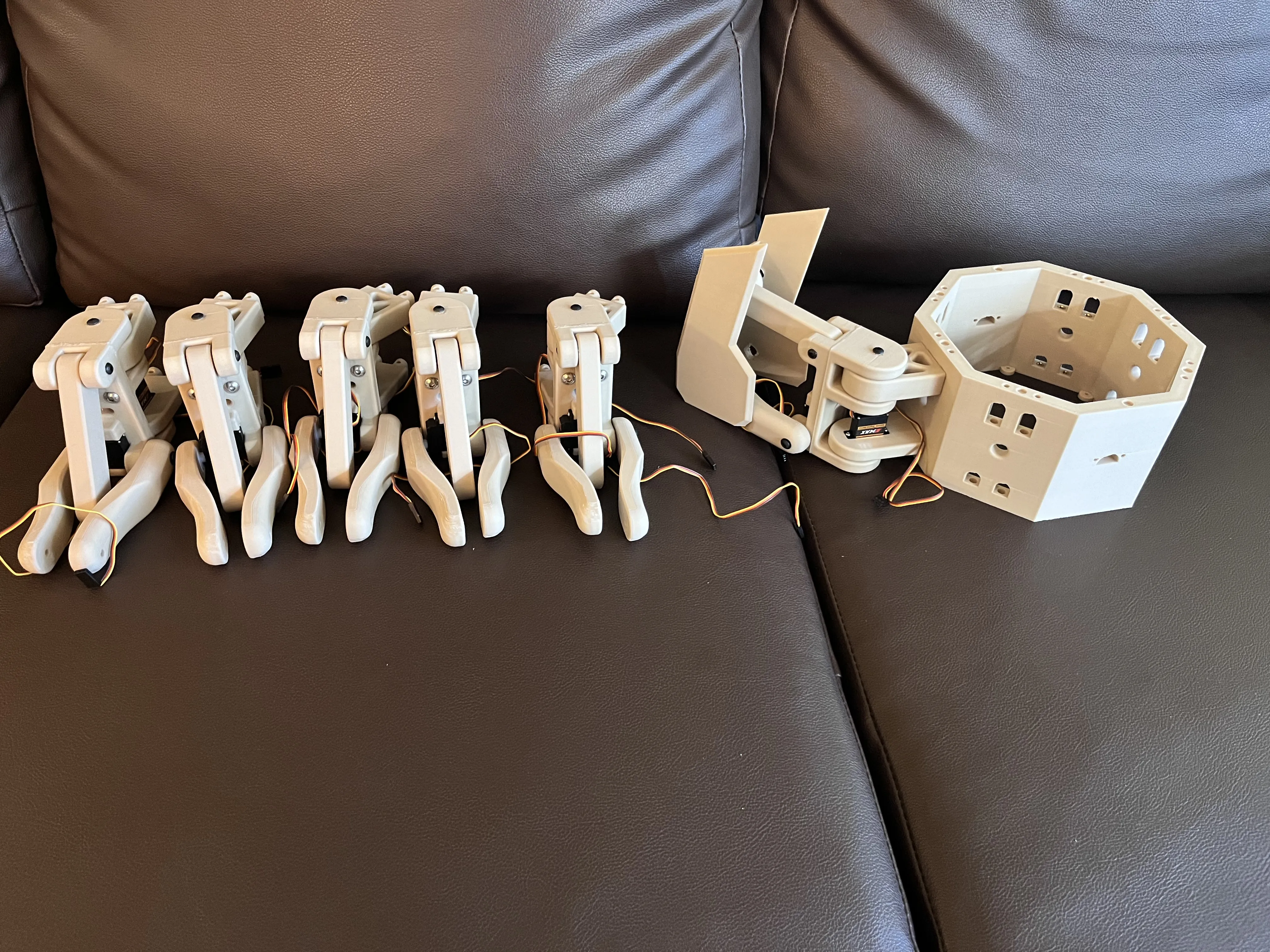

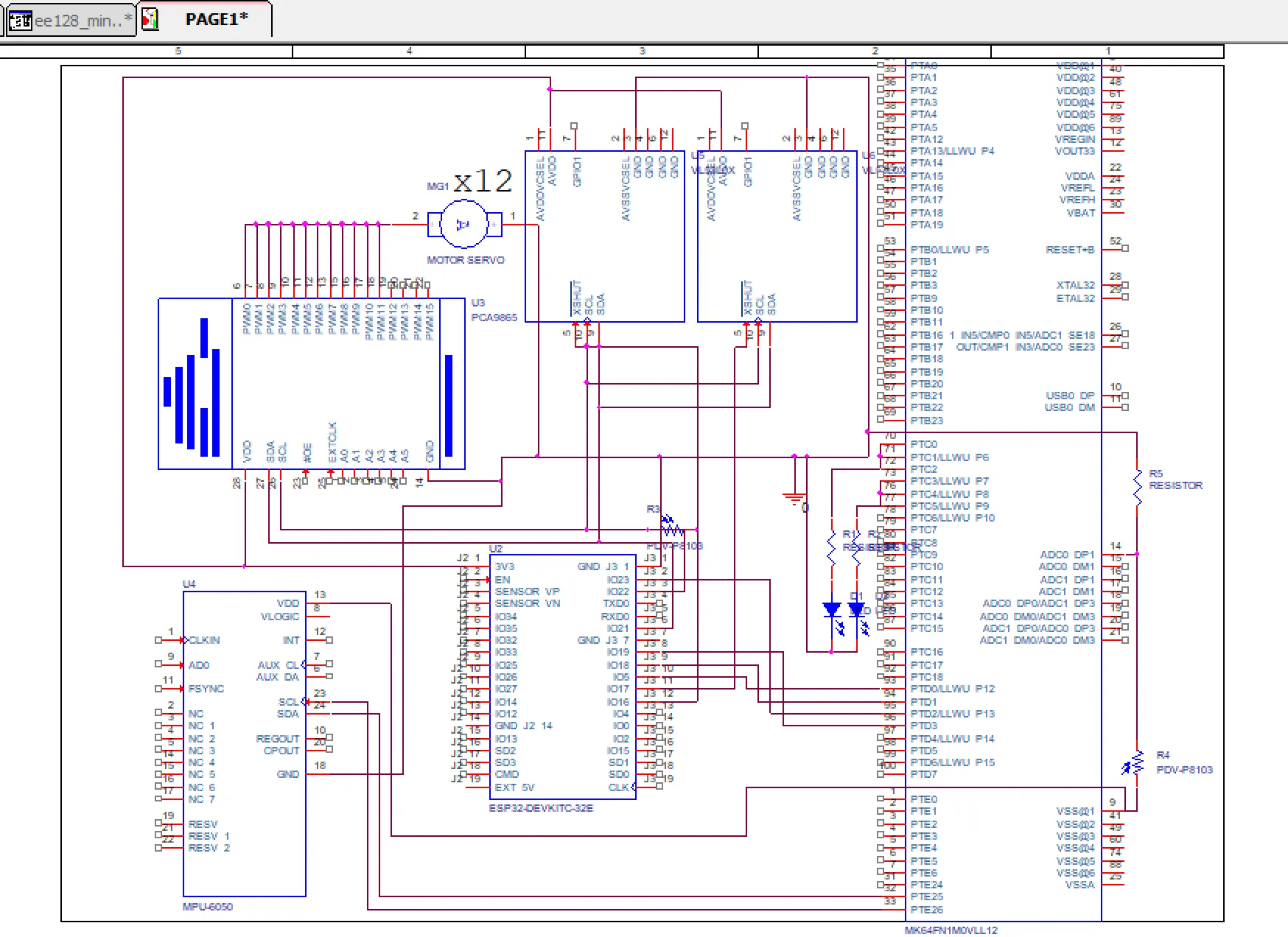
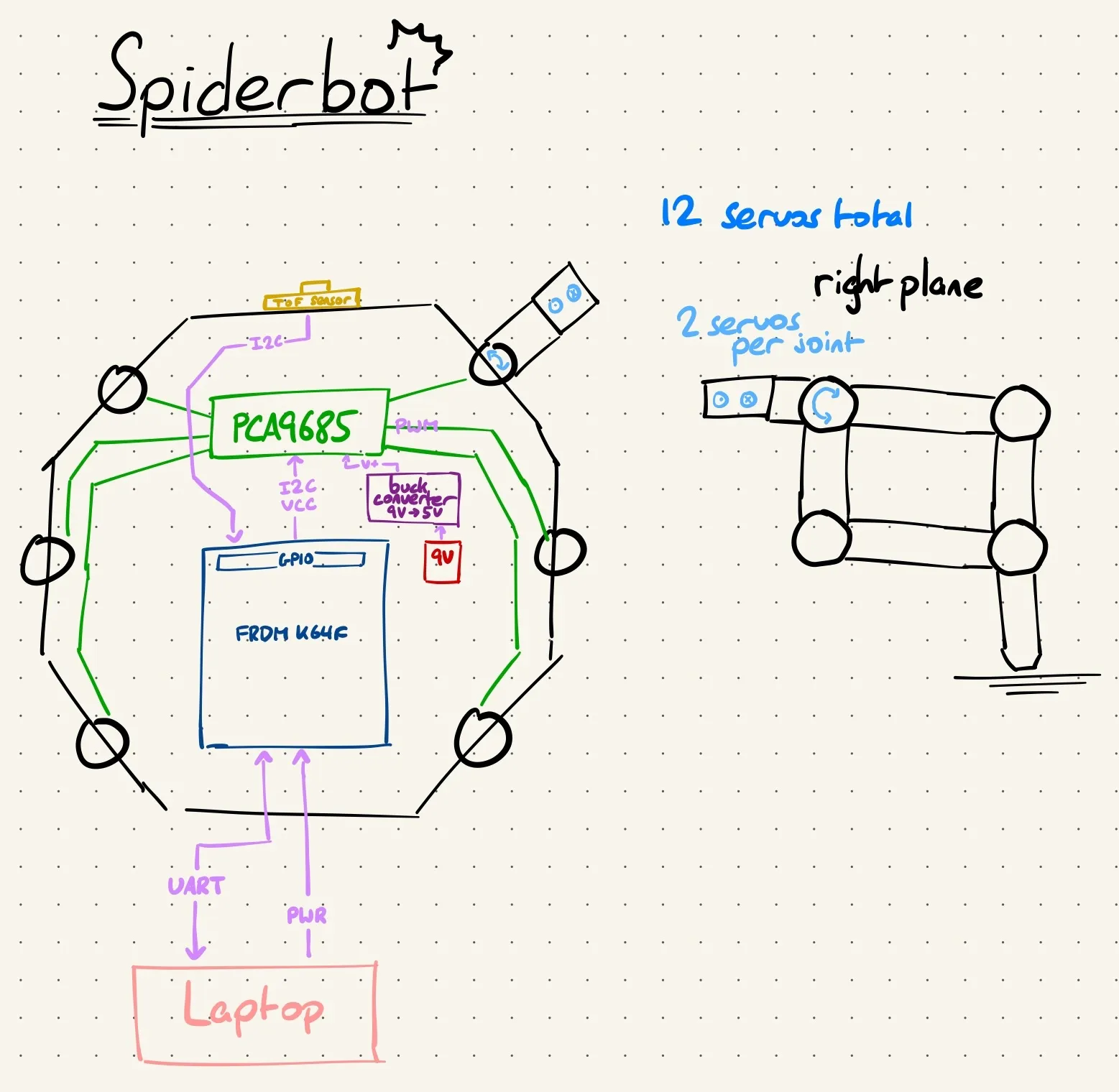
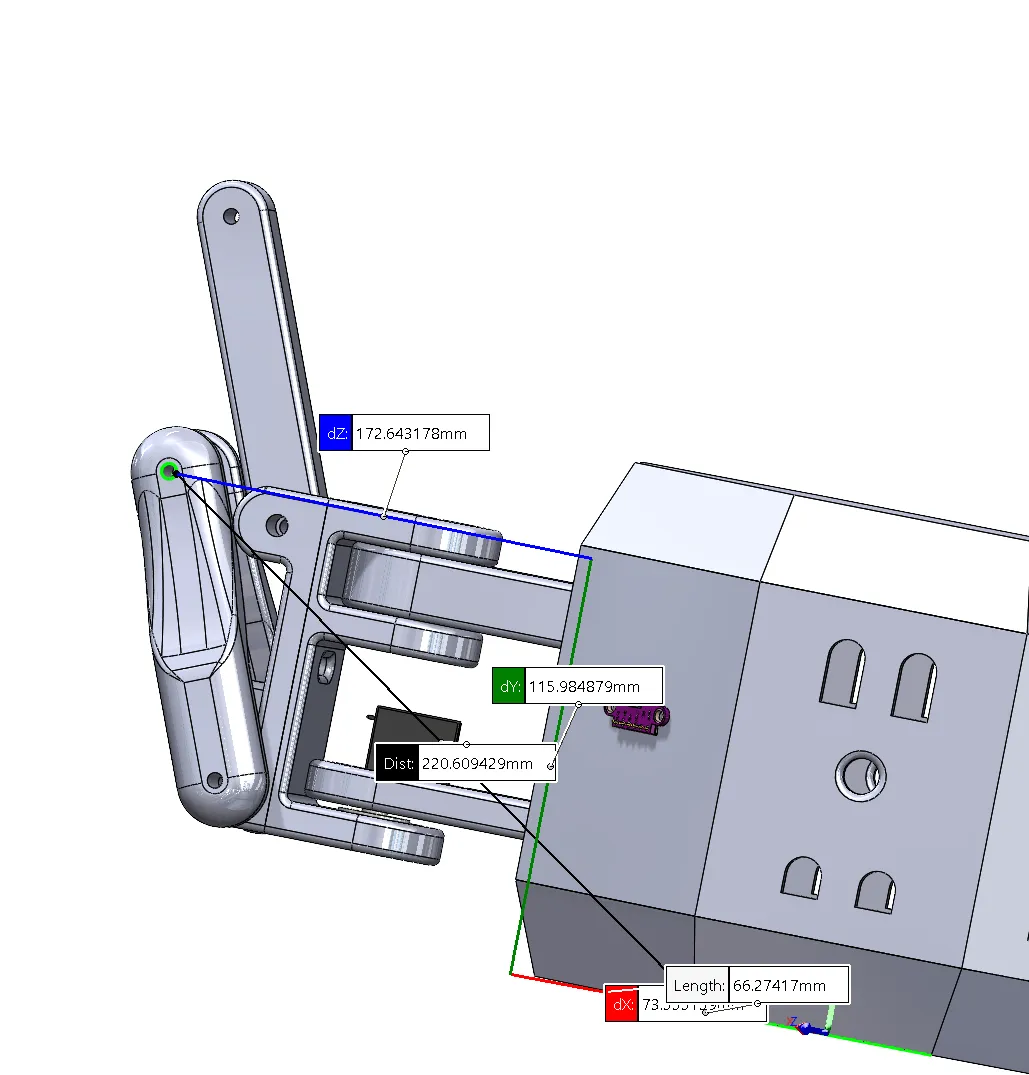
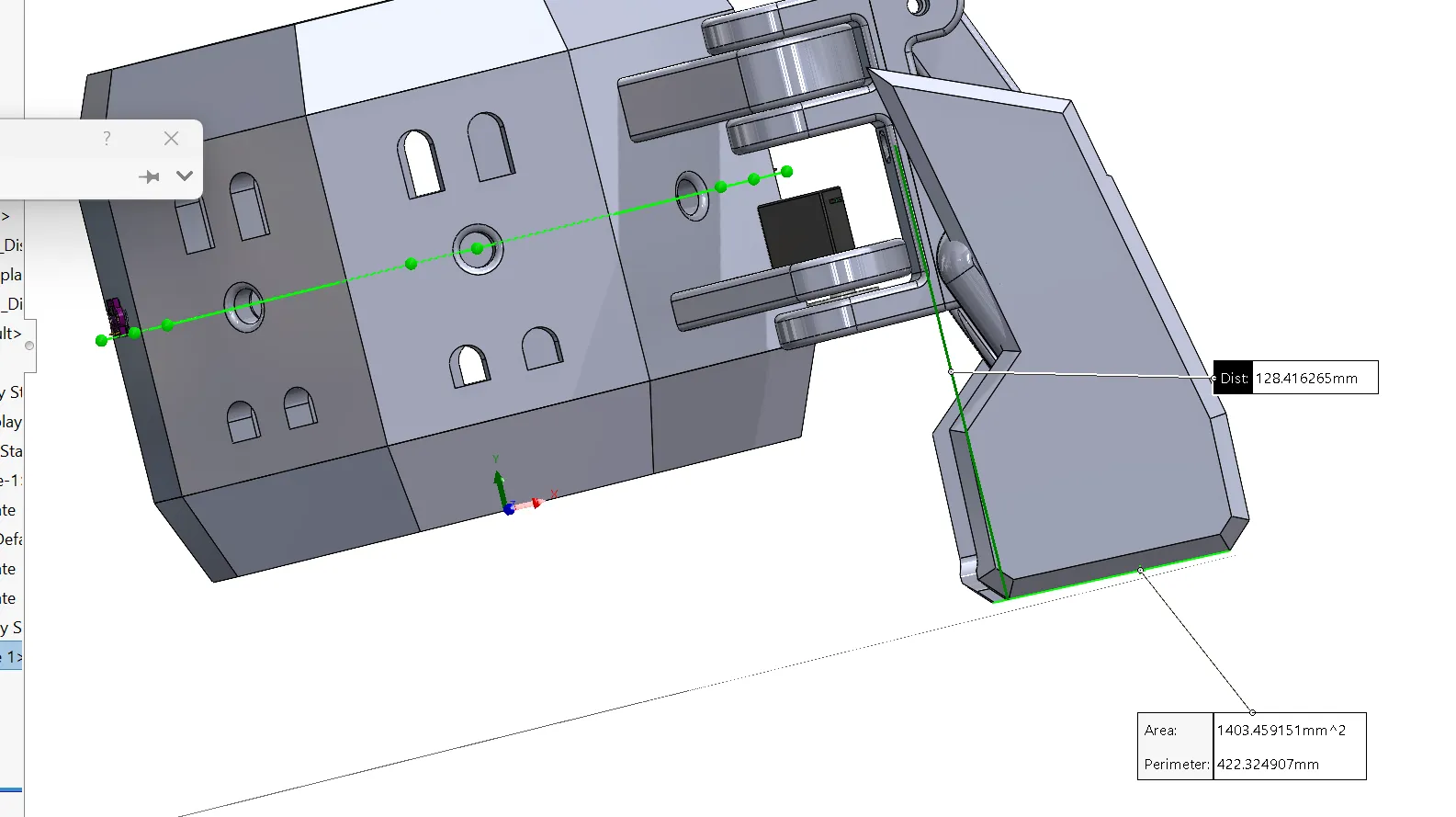
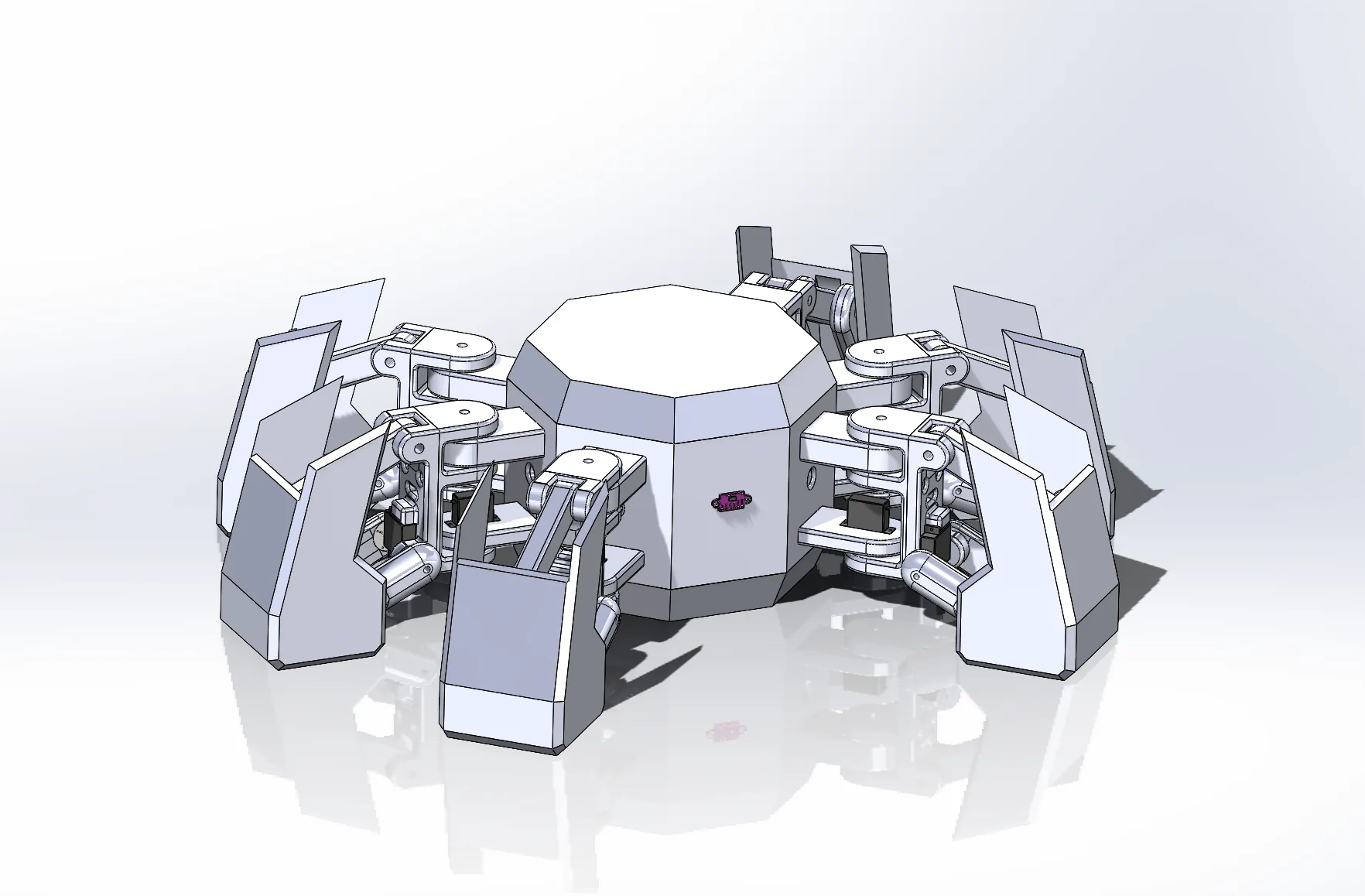
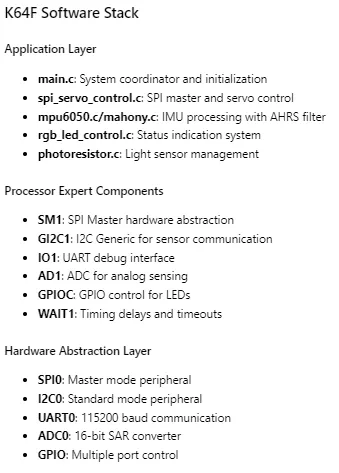
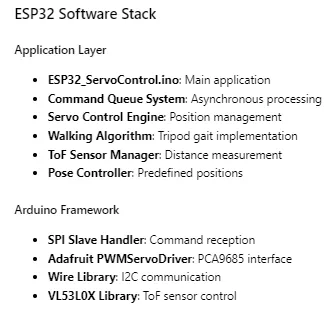
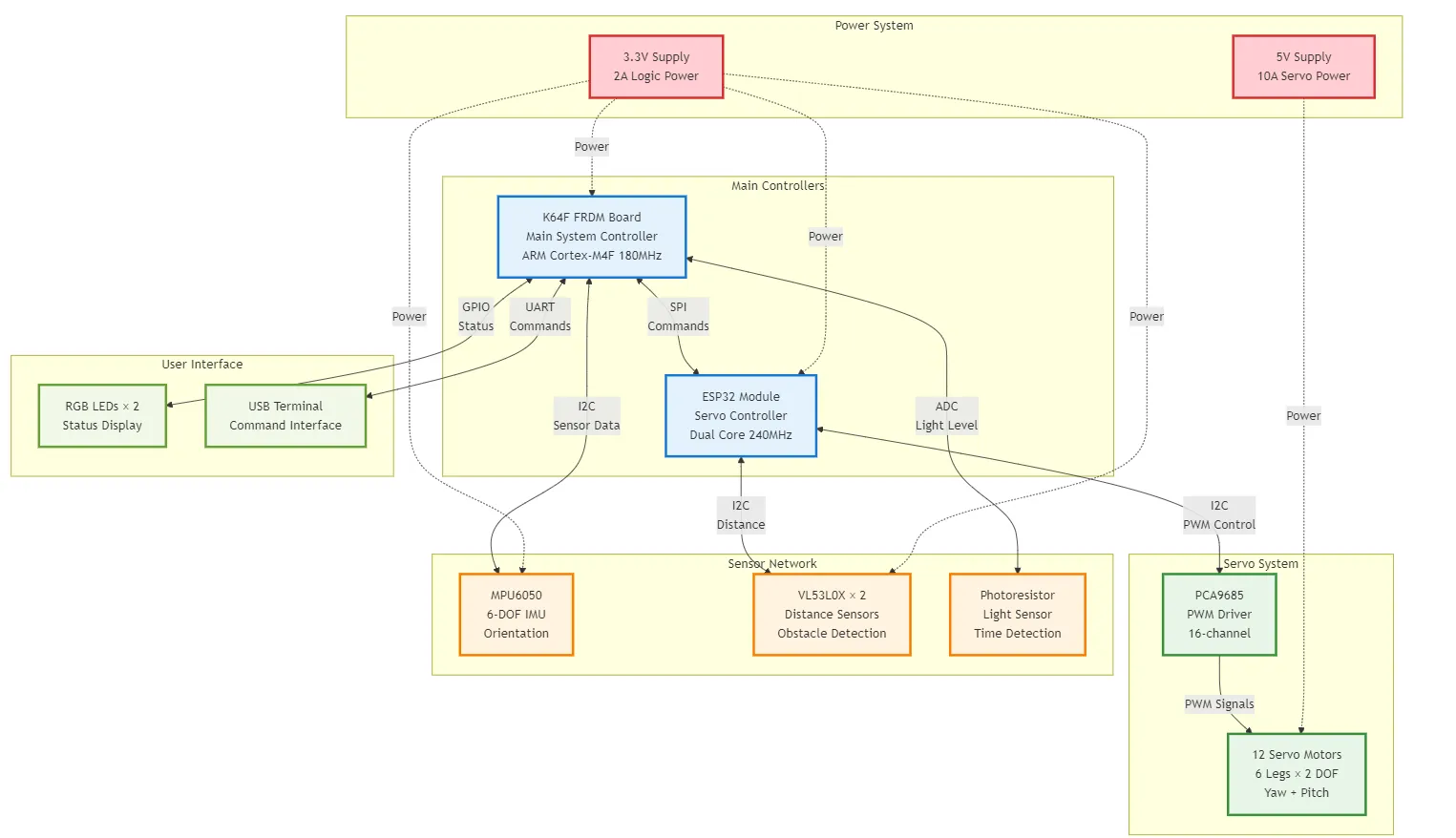
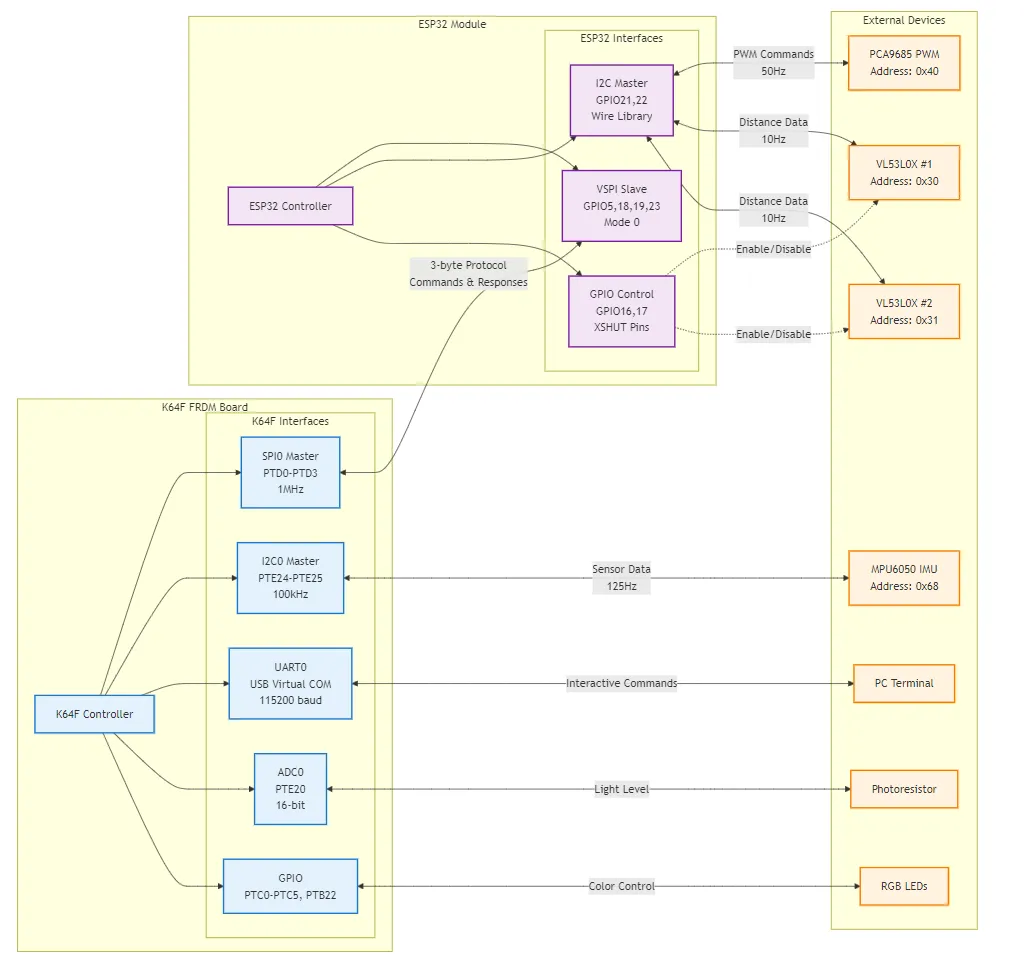
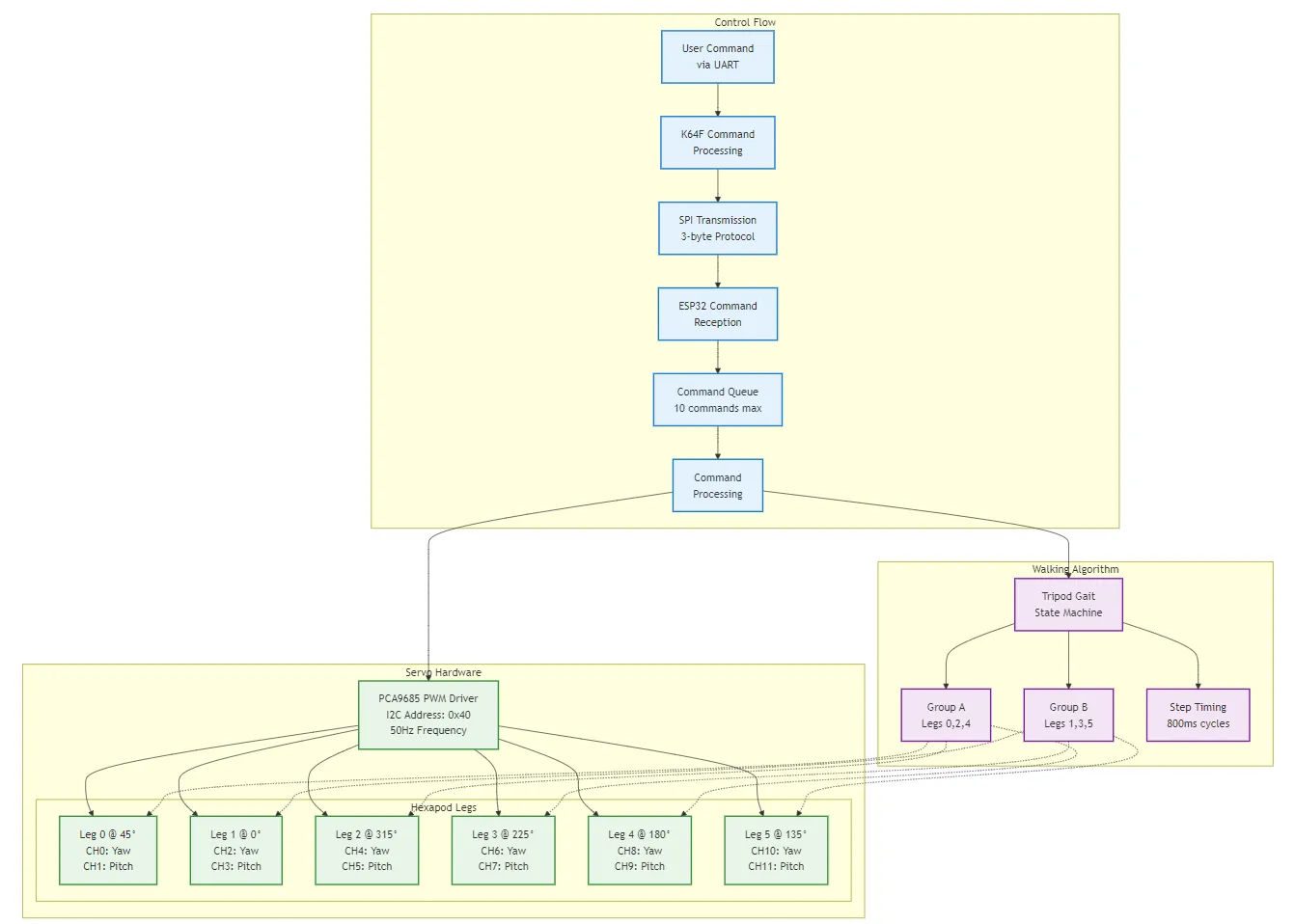
SpiderBot
Complete hexapod robot with 6-leg 4-bar linkage system, distributed control architecture, and advanced sensor integration. See mechanical section for interactive assembly.



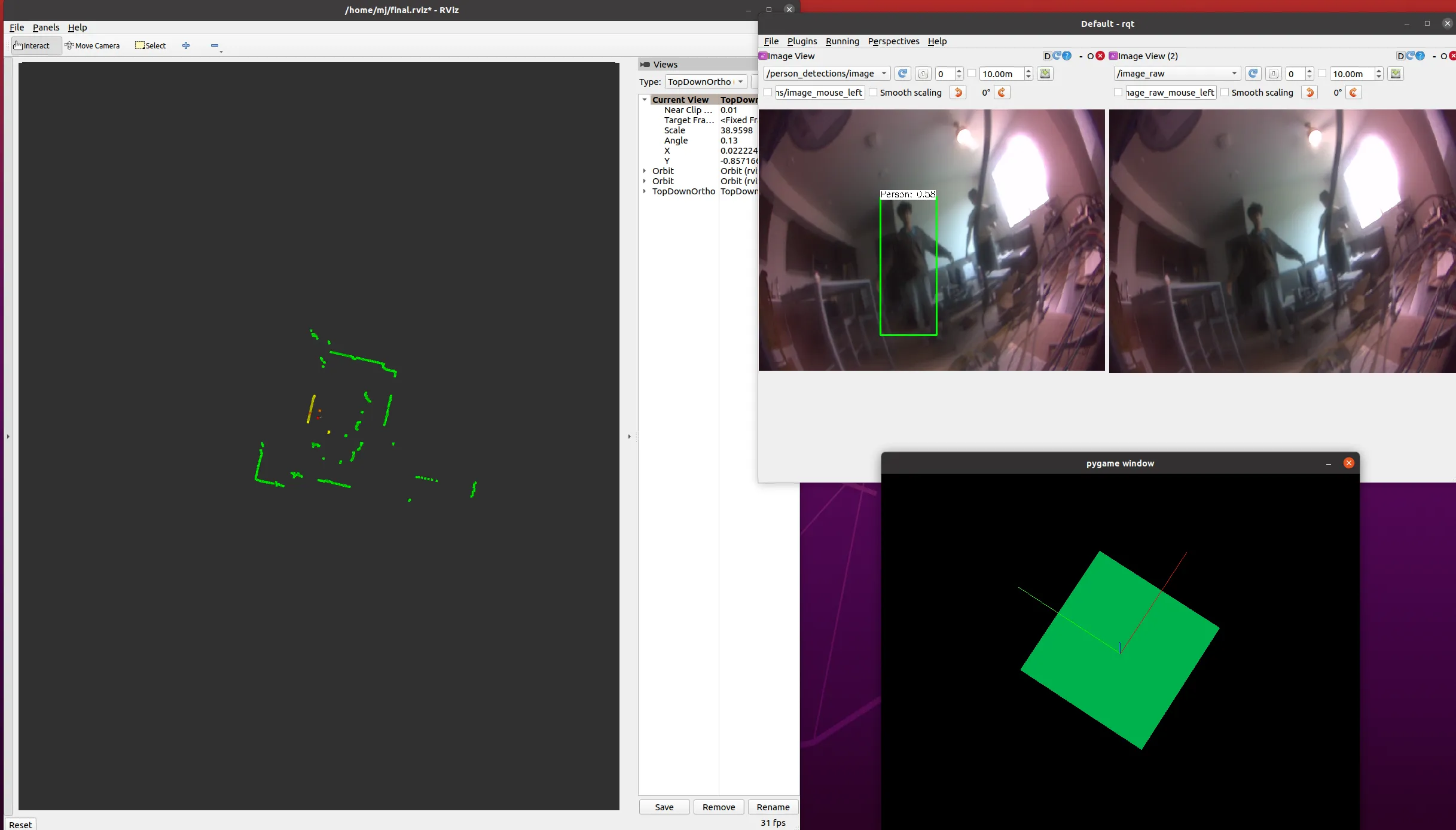
Bin Boy
WIP autonomous trash can with computer vision-based person tracking and voice command system.


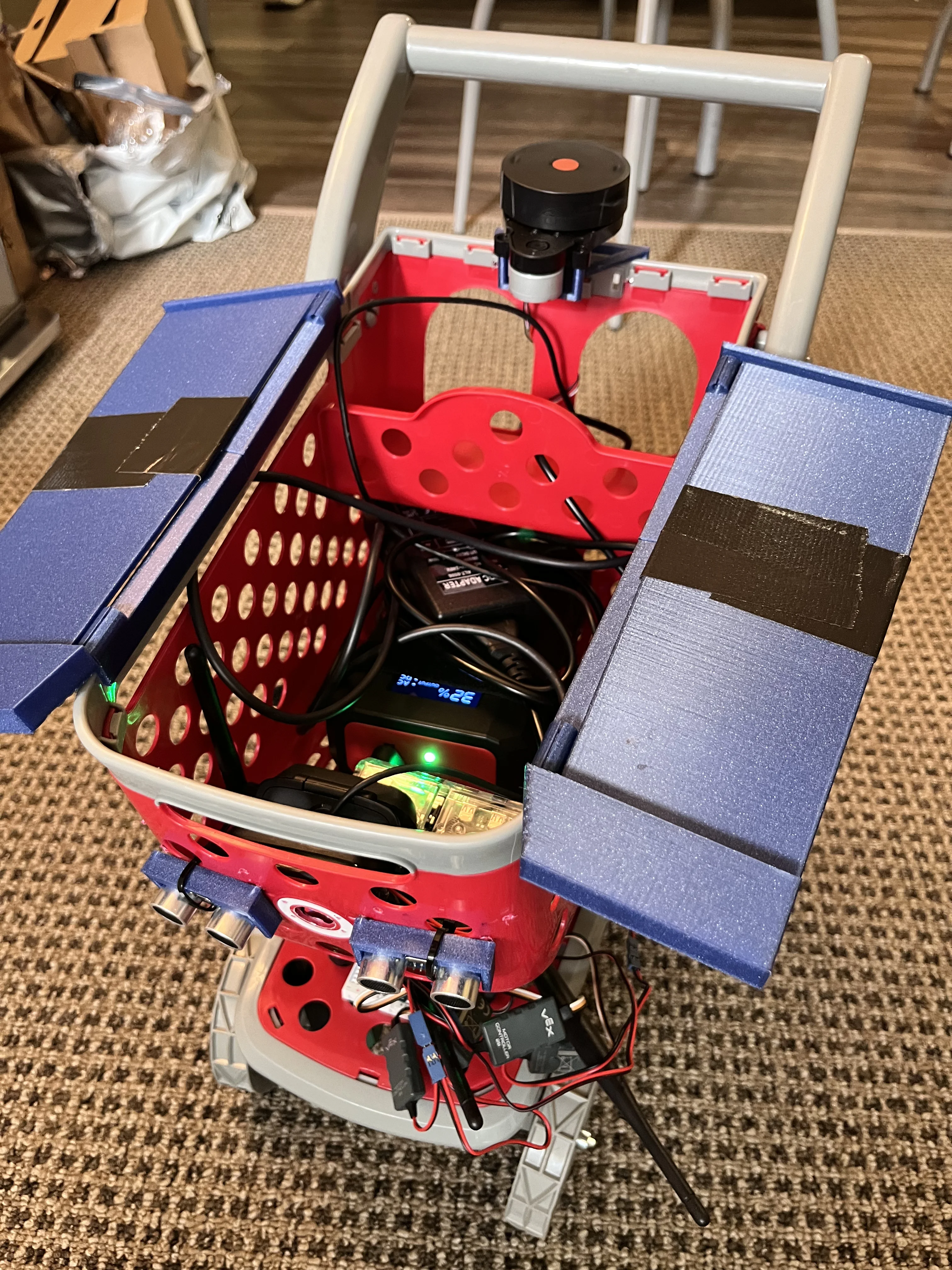
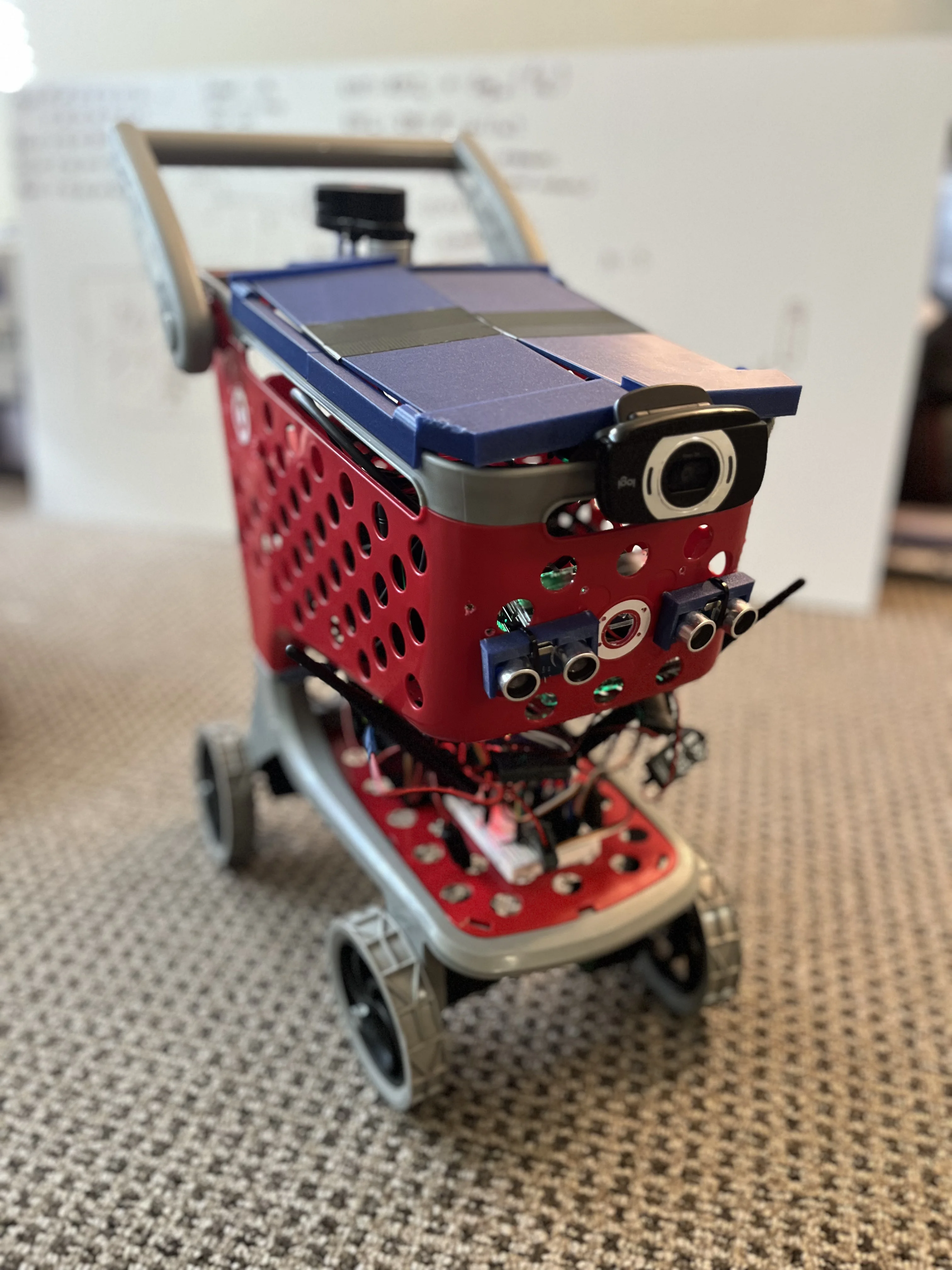
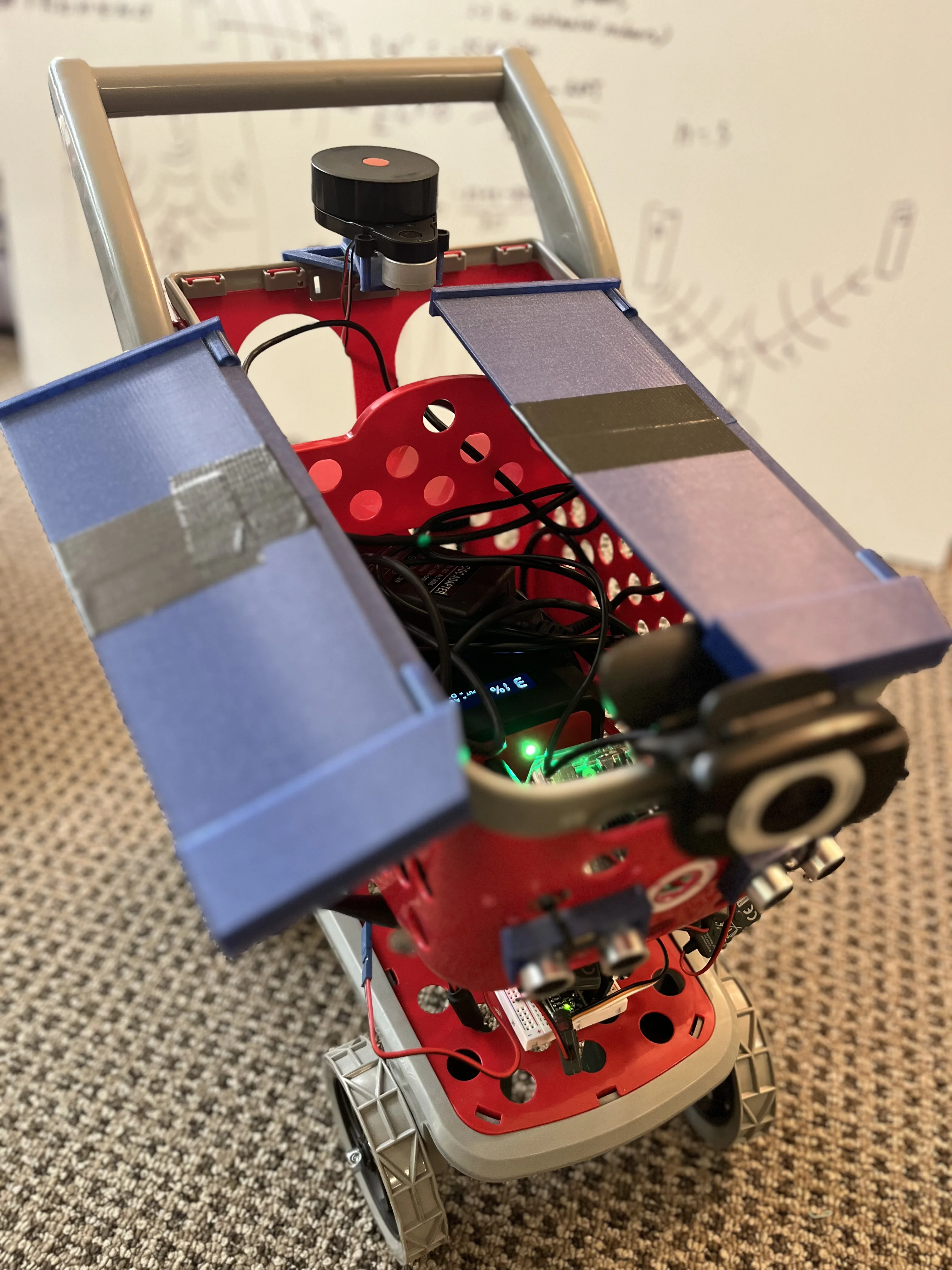
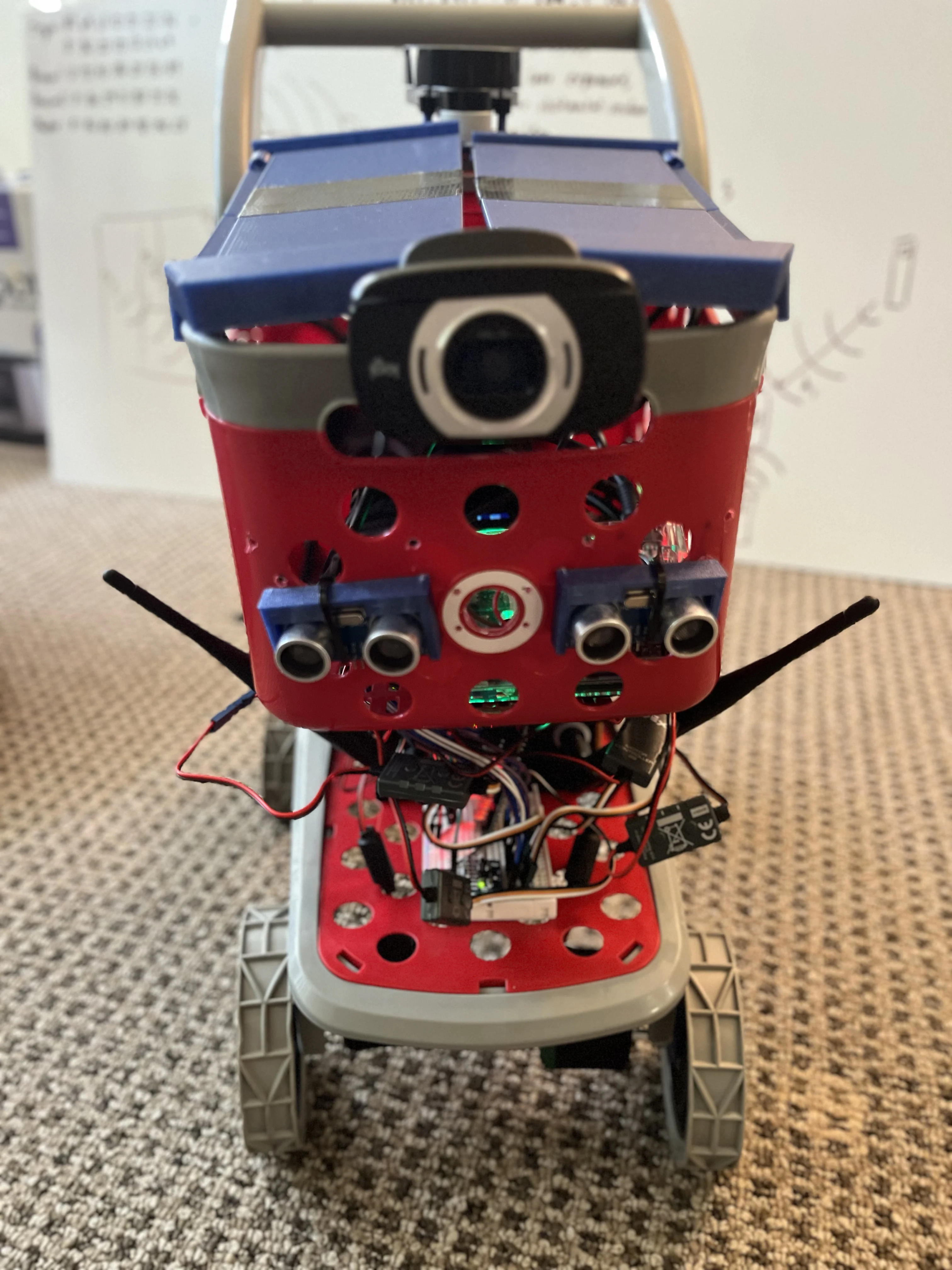
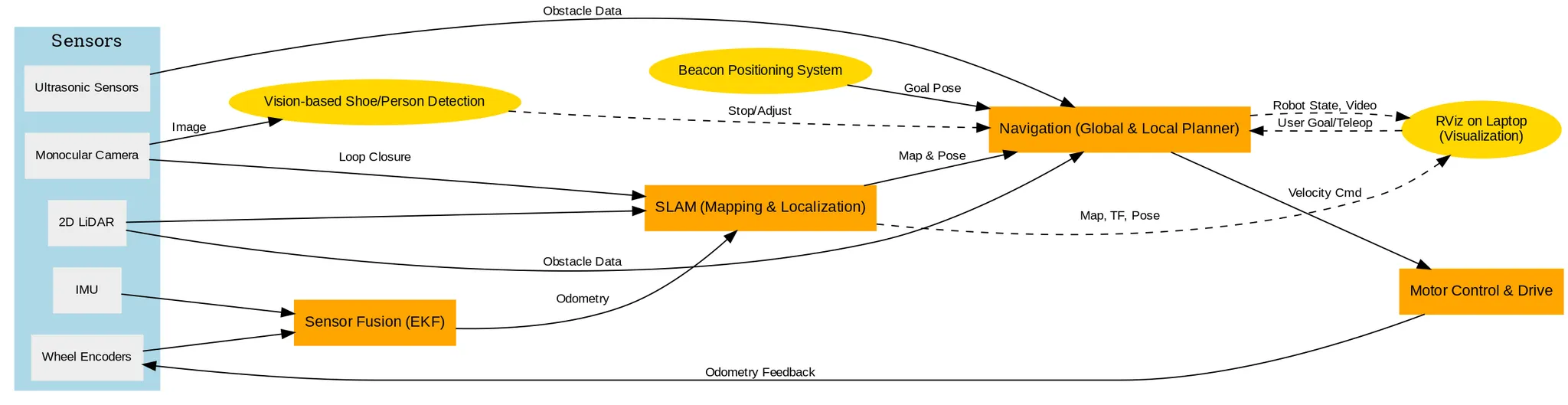

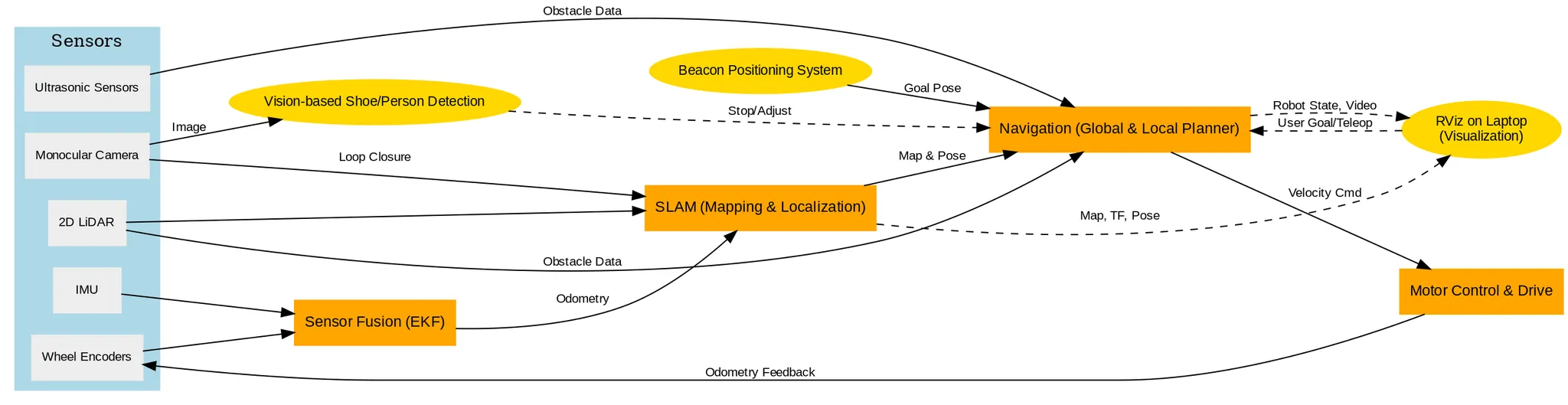


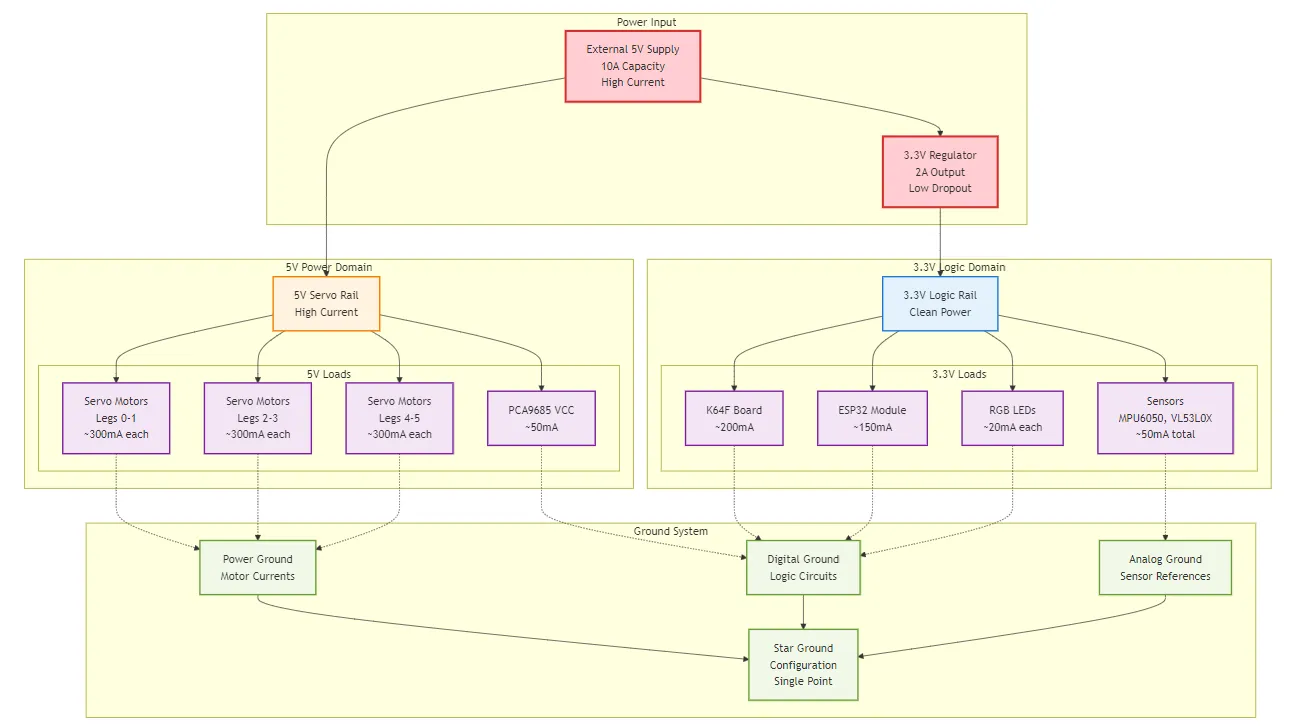
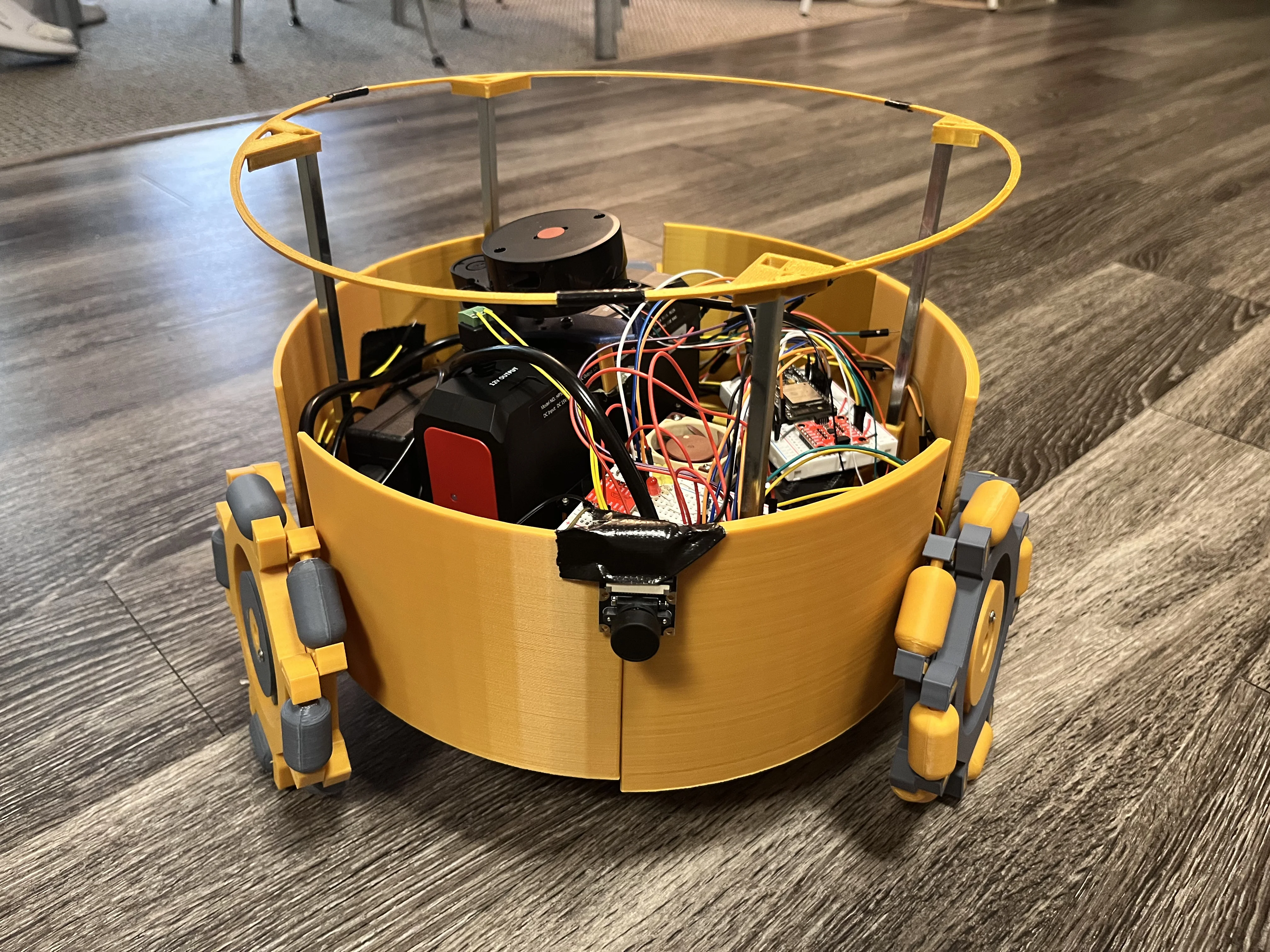
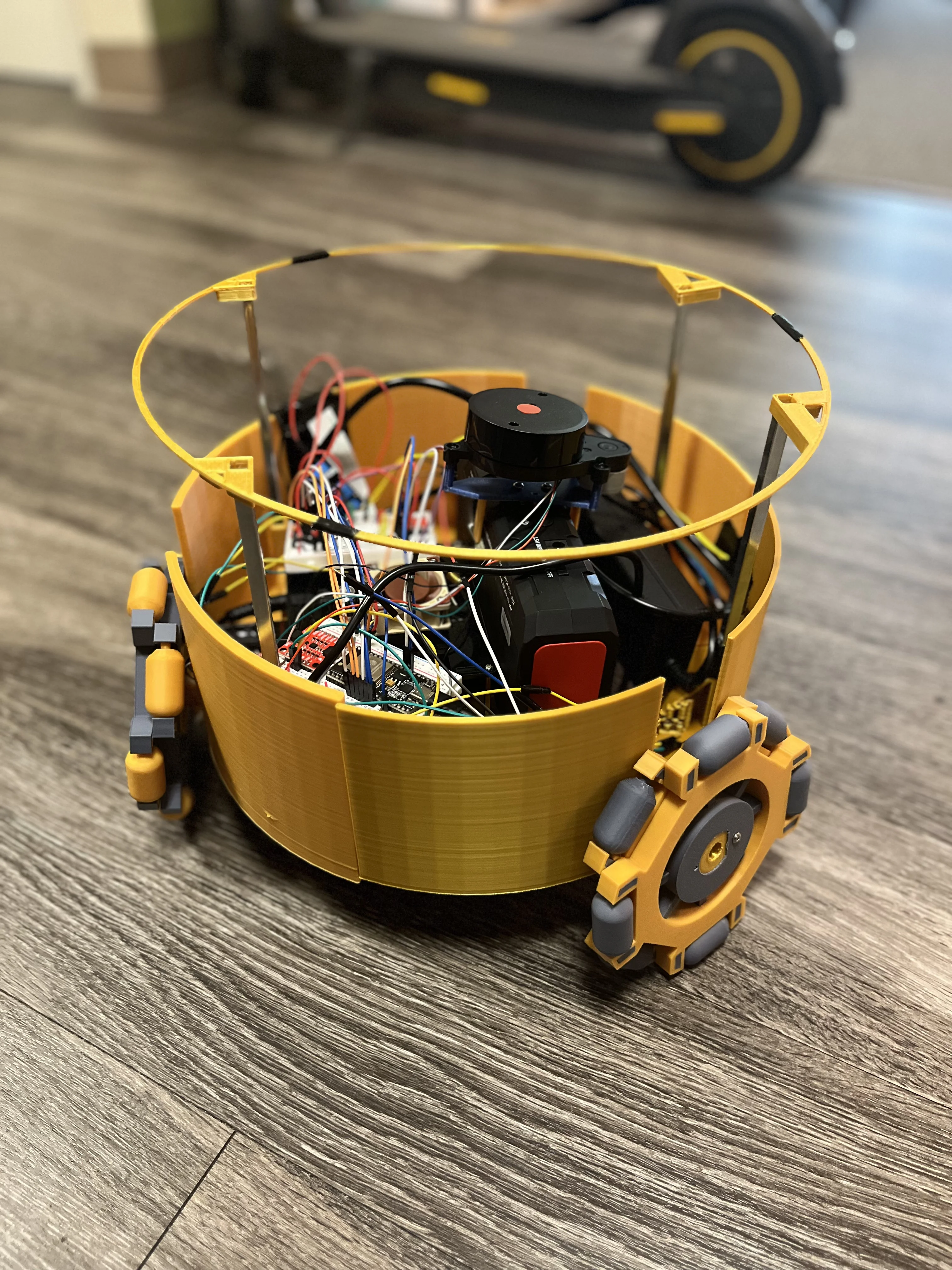
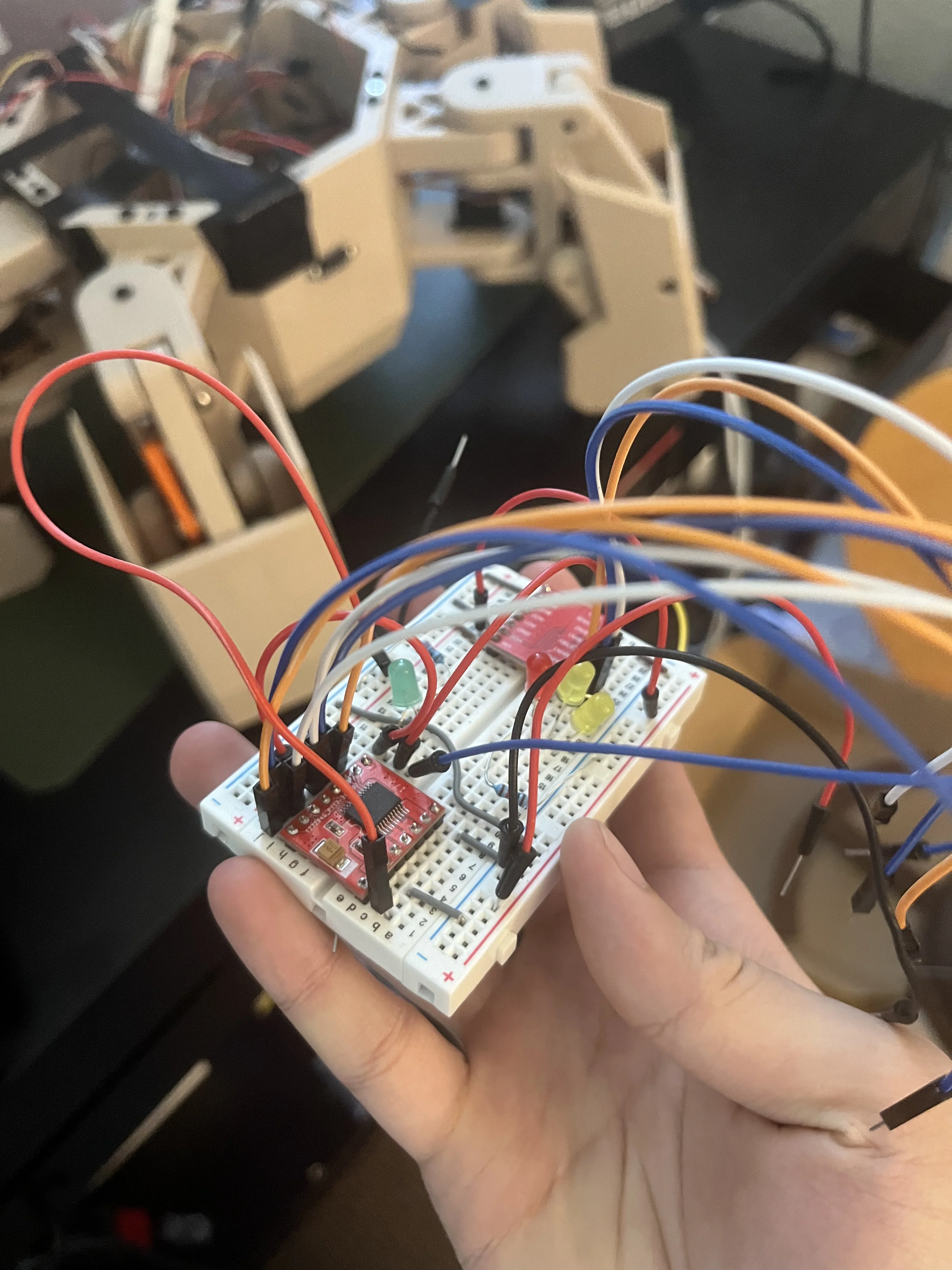
MOLL-E Autonomous Shopping Cart
WIP small-scale autonomous shopping cart with planned SLAM-based navigation and multi-sensor fusion.
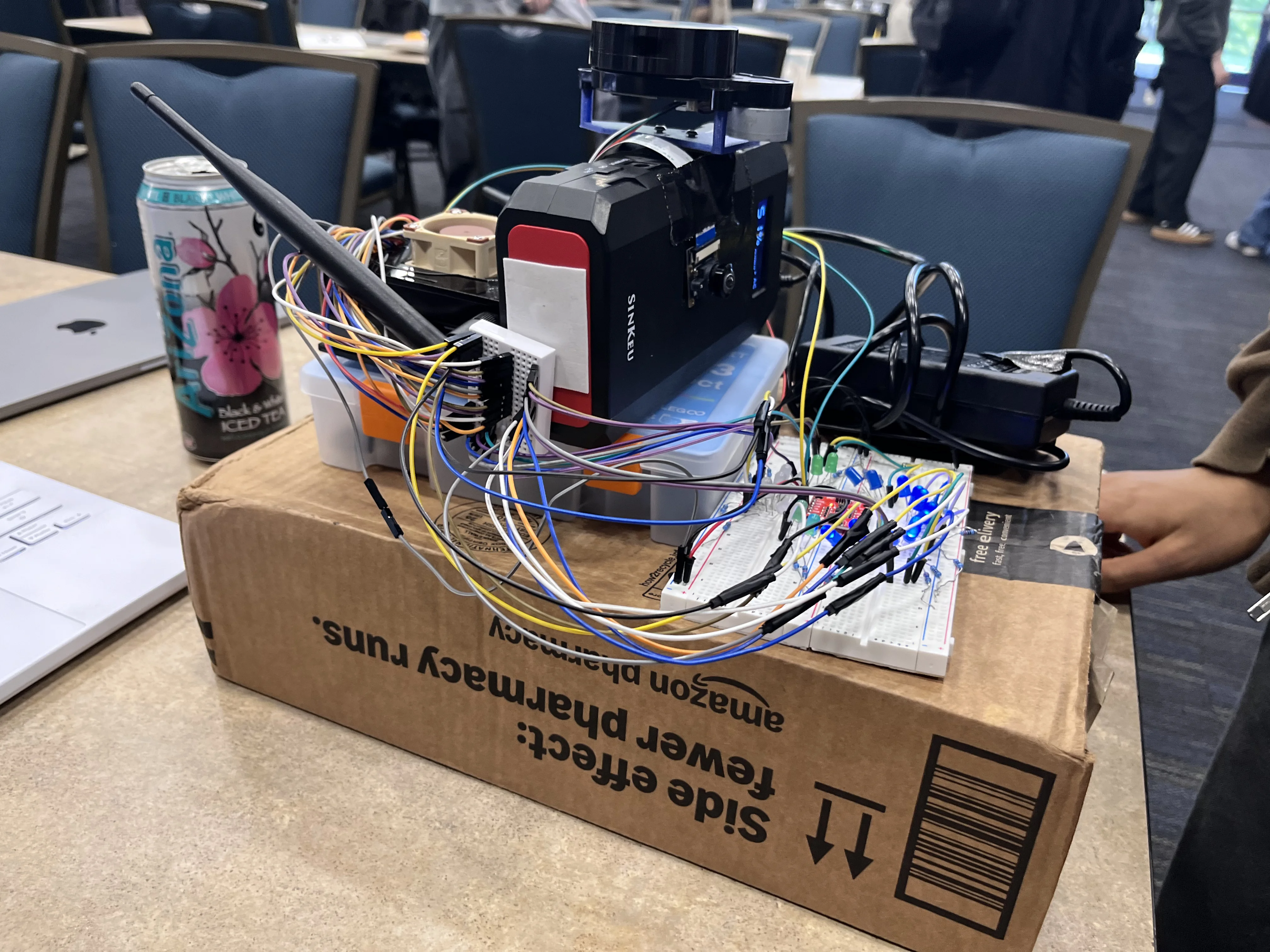
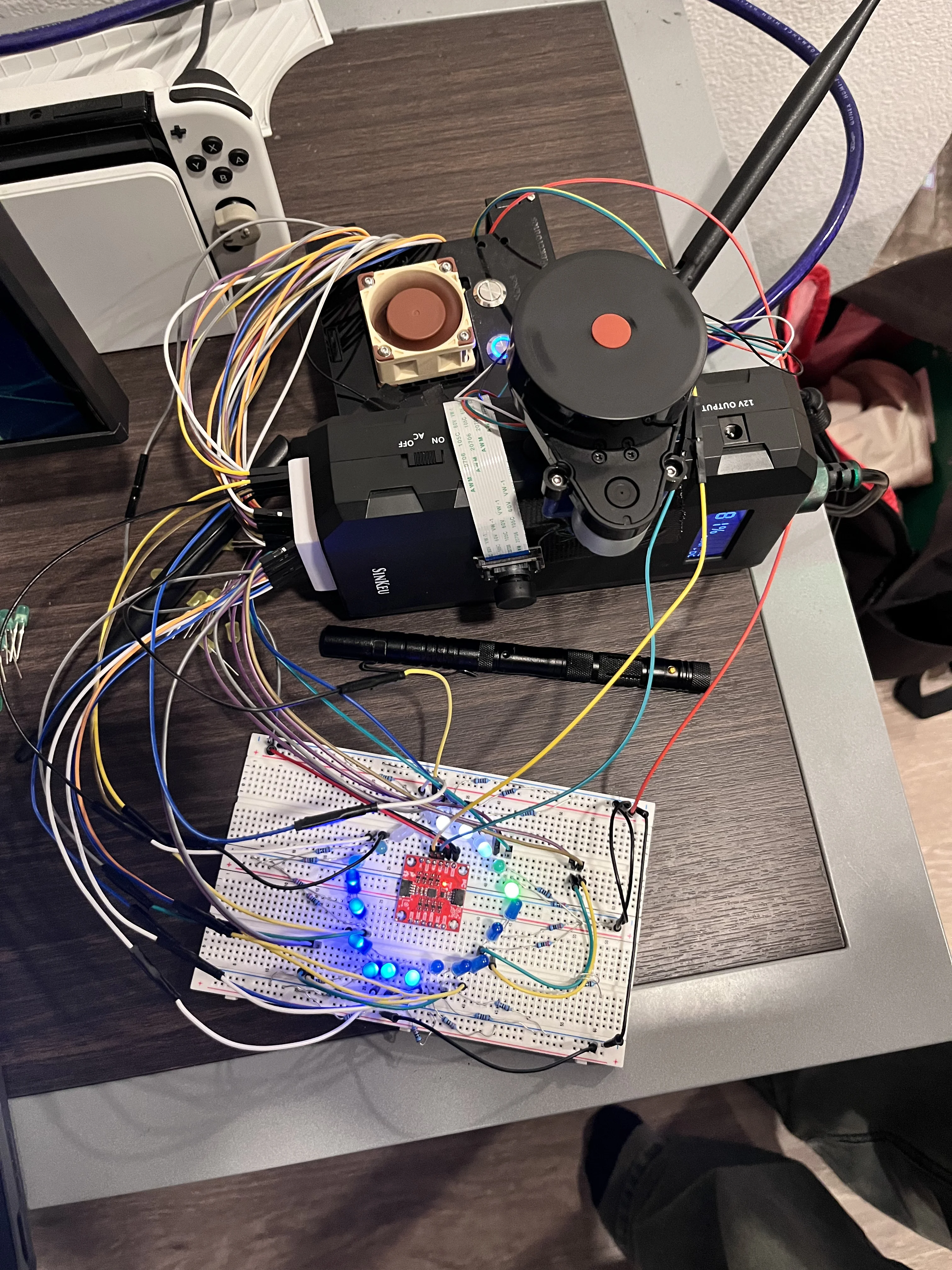
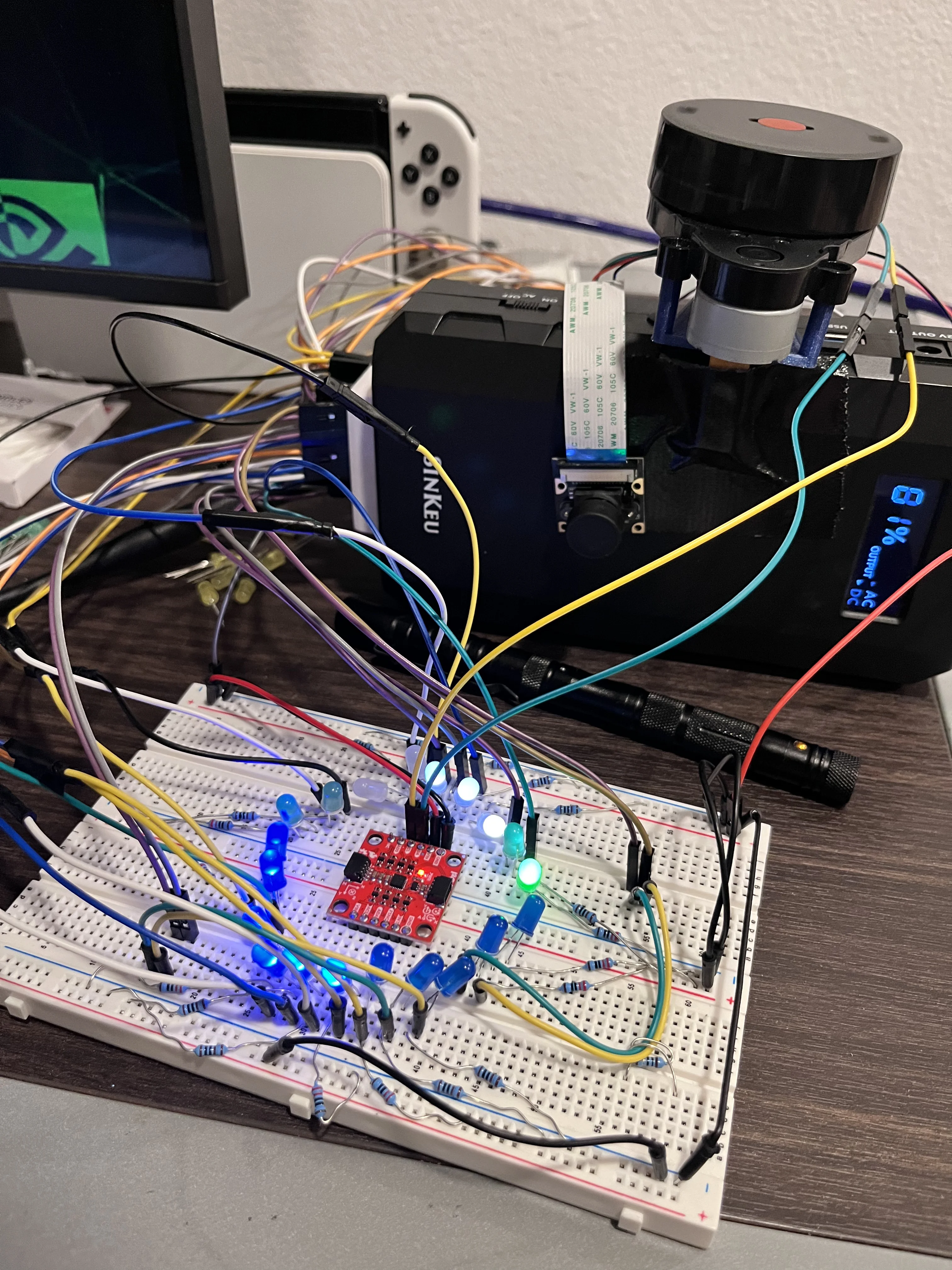
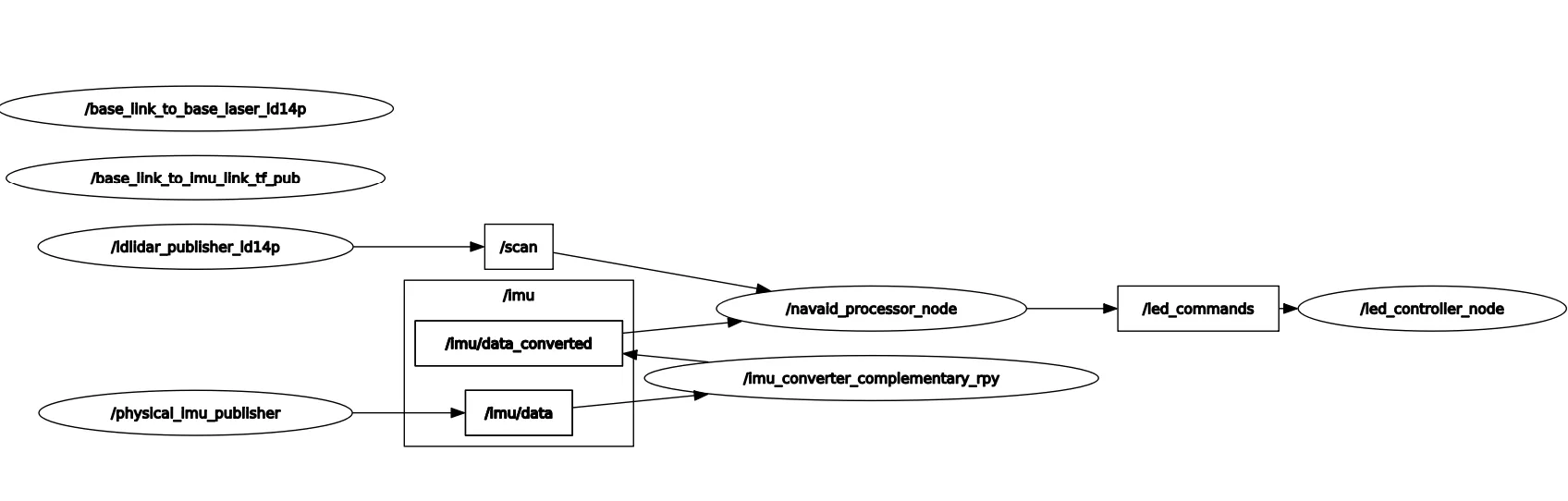
NavAid
Visually impaired navigation system with 2D LiDAR obstacle detection and LED belt warnings.
UC Irvine VenusHacks 2025
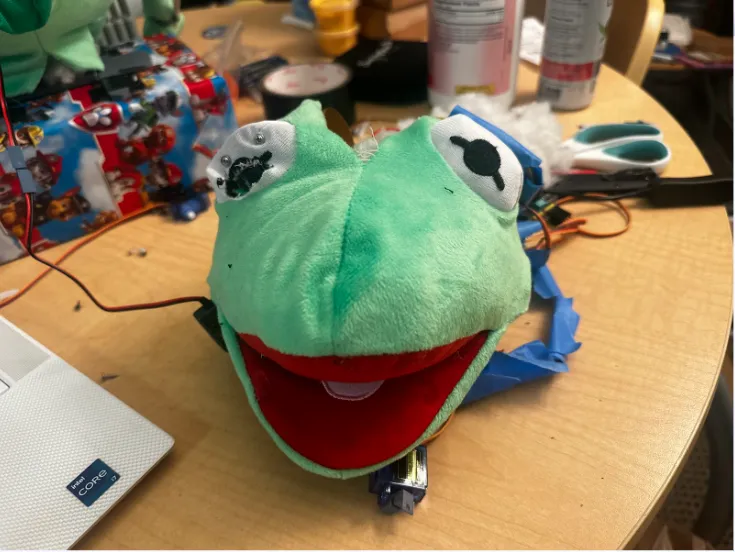
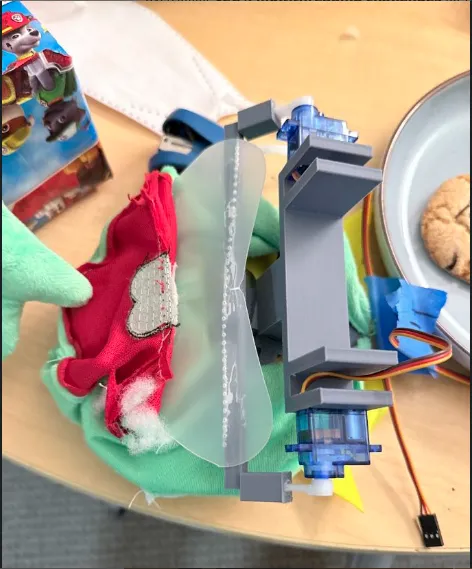


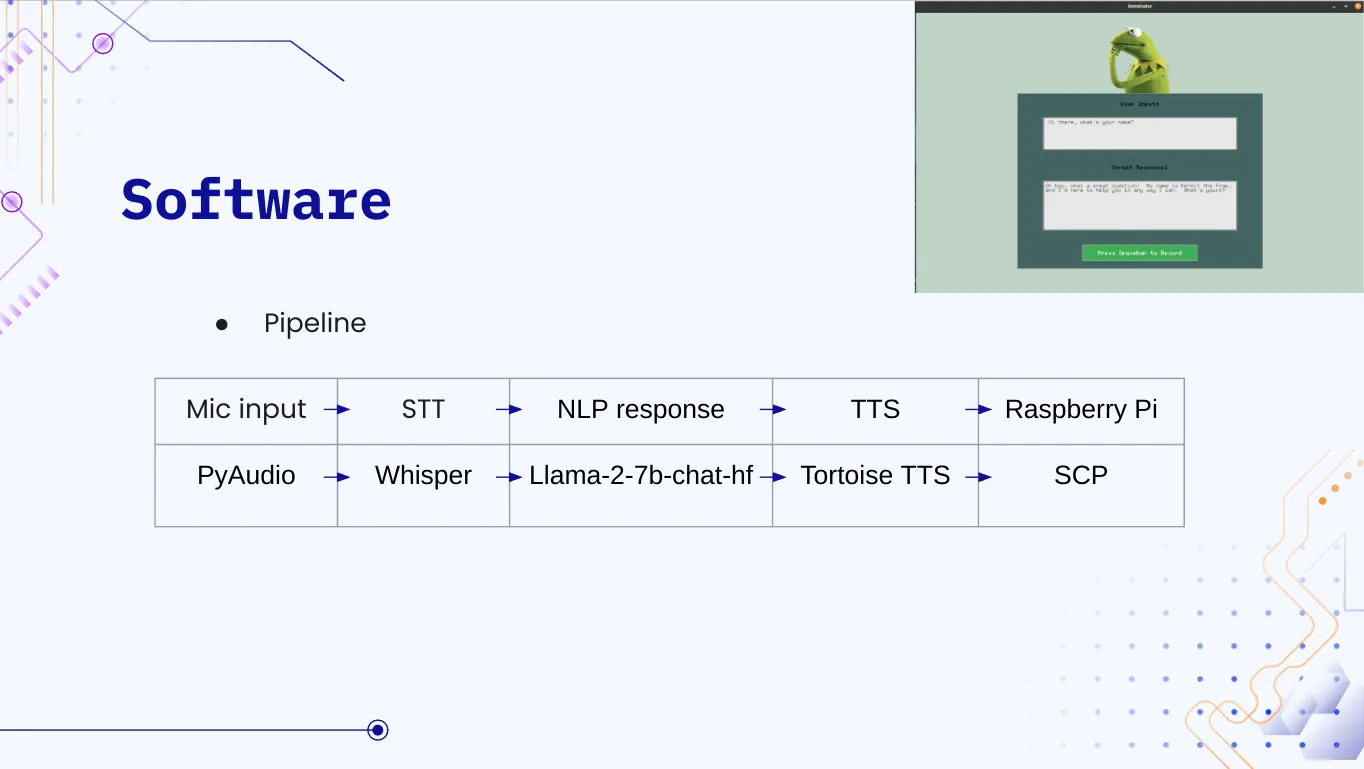
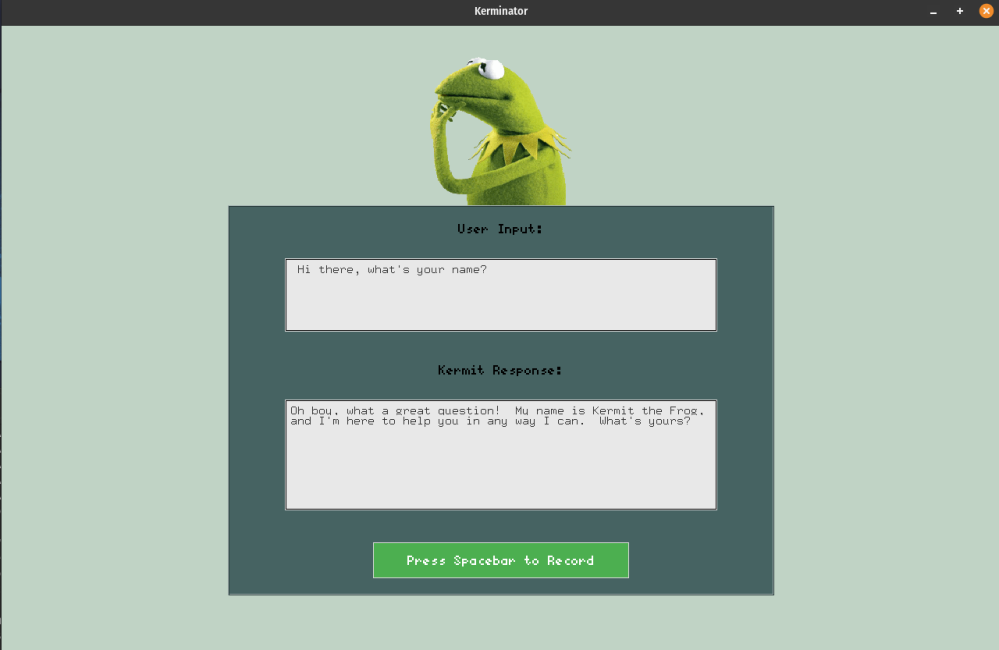
Kerminator
A Kermit hand puppet transformed into smart robotic companion. Features smart tracking, responsive movement, and verbal conversational AI.
UC Riverside Rose Hack 2025
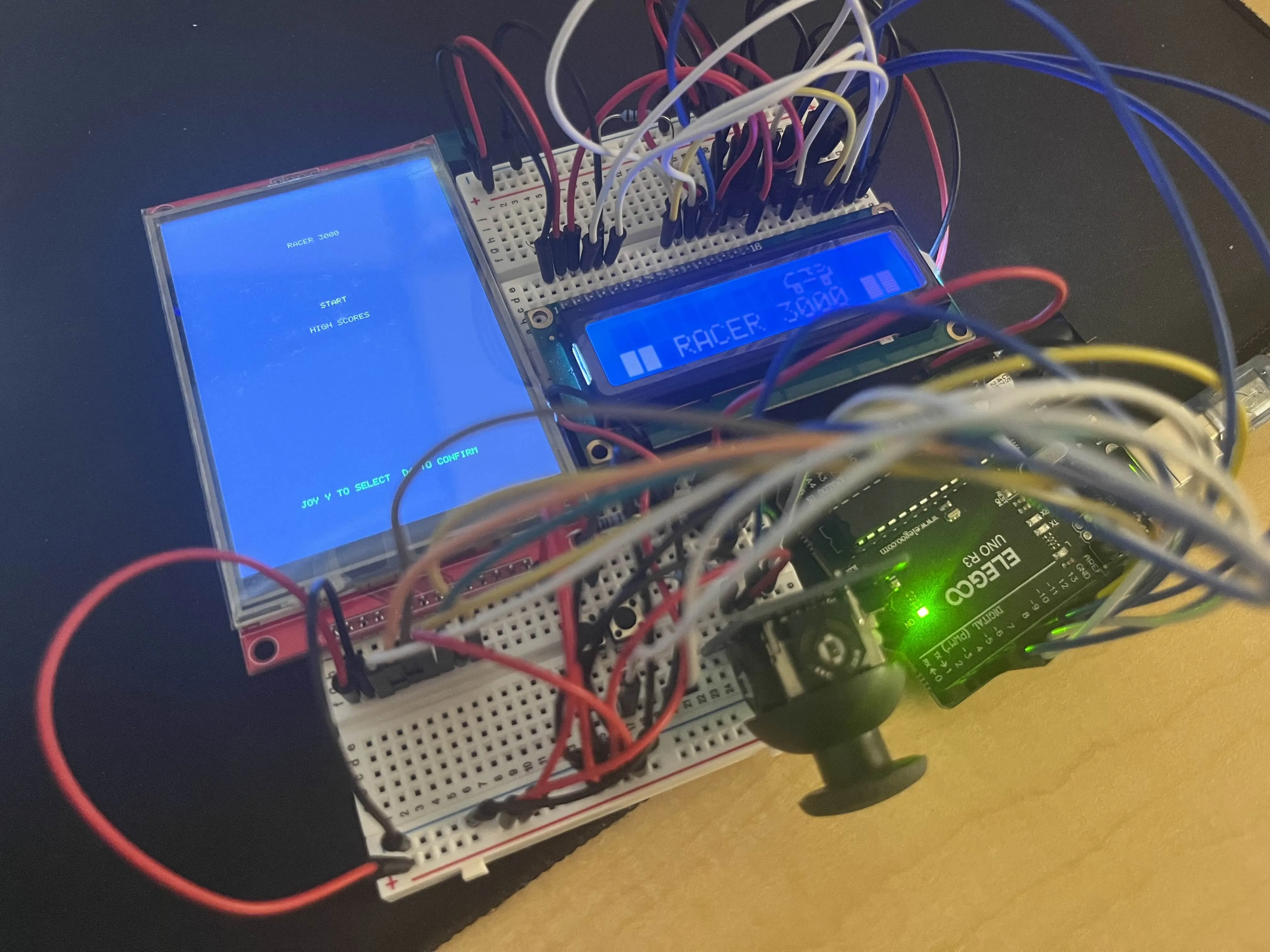
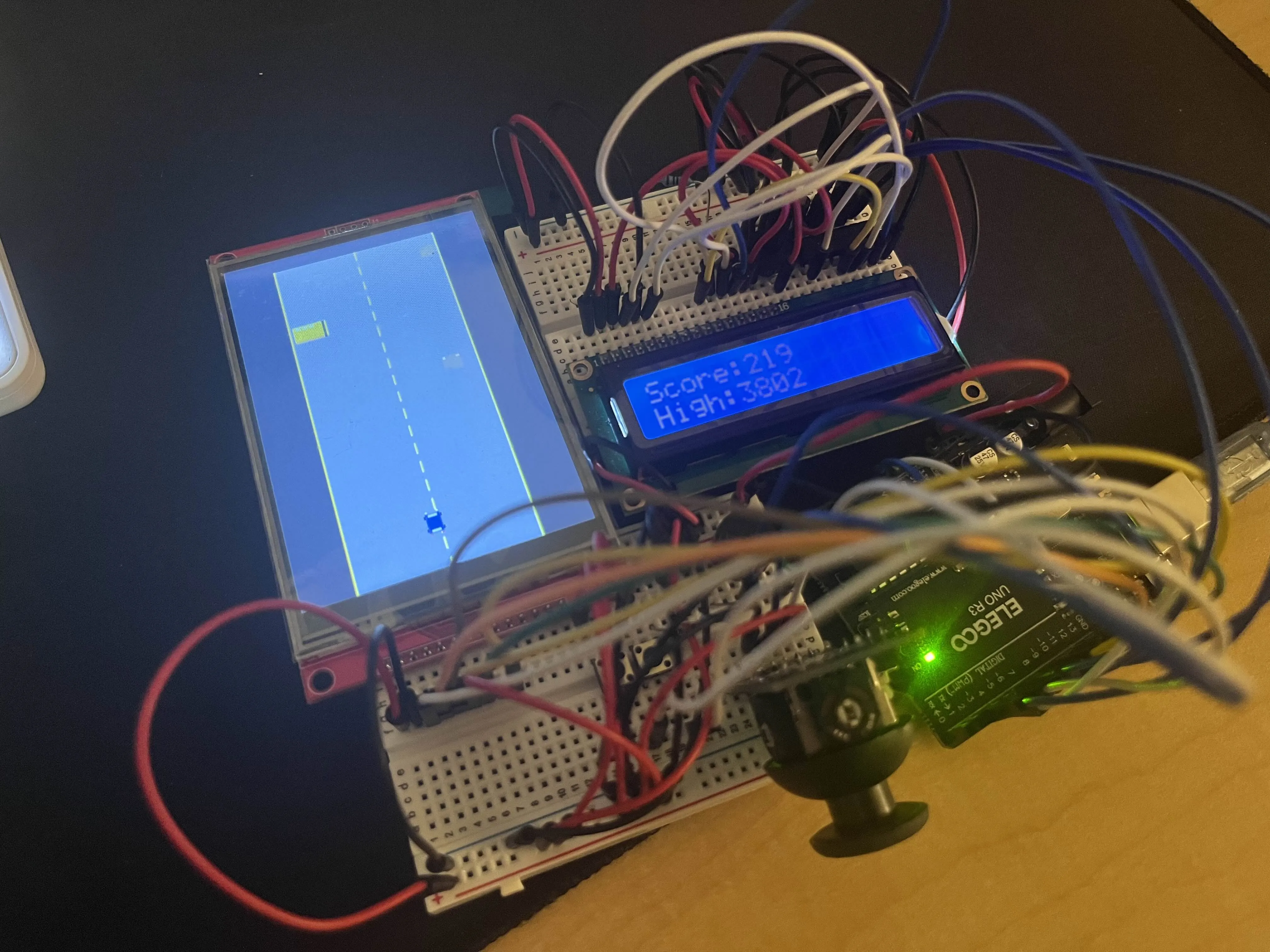
Racer 3000
Embedded Arduino racing game with dual LCD displays, optimized for memory-constrained hardware.
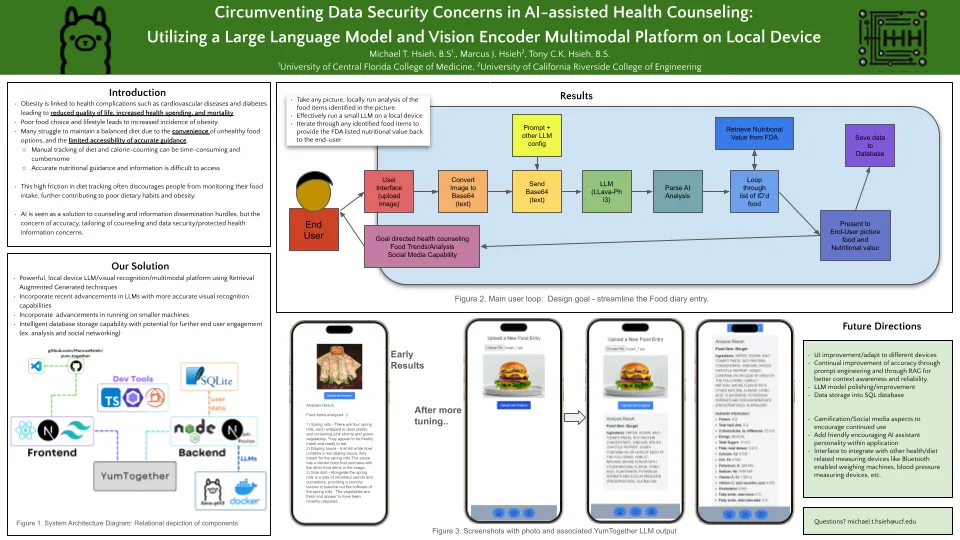

YumTogether
Privacy-first health counseling platform using containerized local LLM, avoiding cloud data exposure.
2024 UCF Artificial Intelligence in Medicine Summit
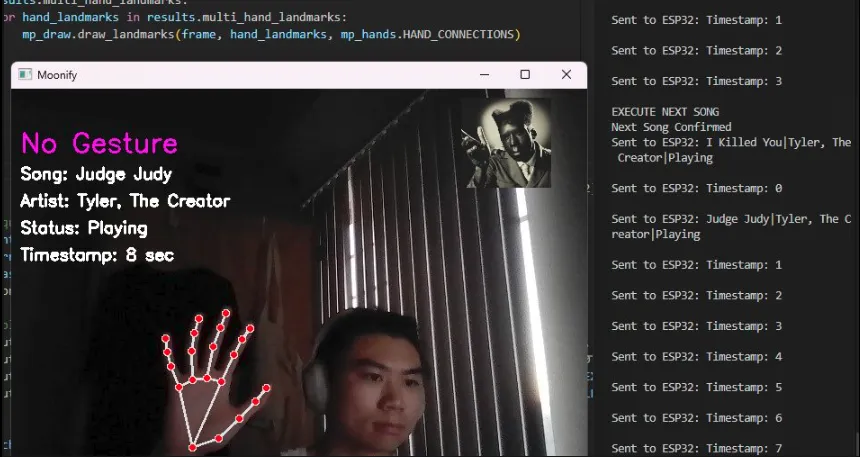
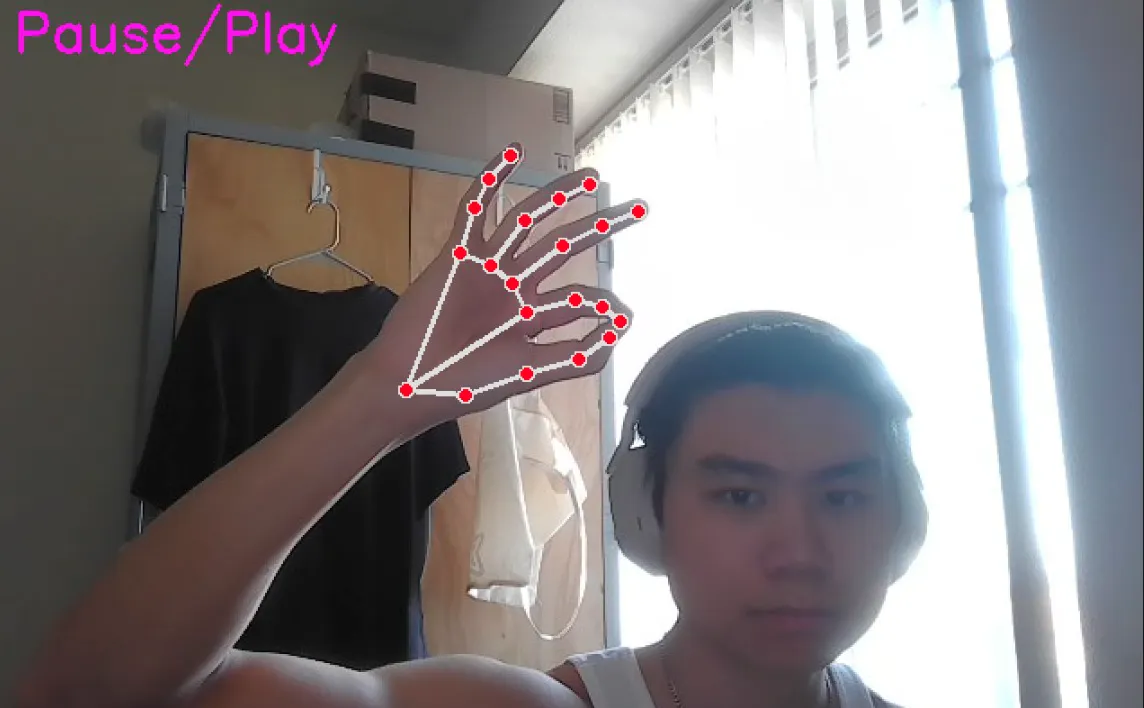

Moonify
A gesture-based Spotify carplay device, utilizing OpenCV, Python, and the Spotify API to control song playback.
UCR Cutie Hack 2024
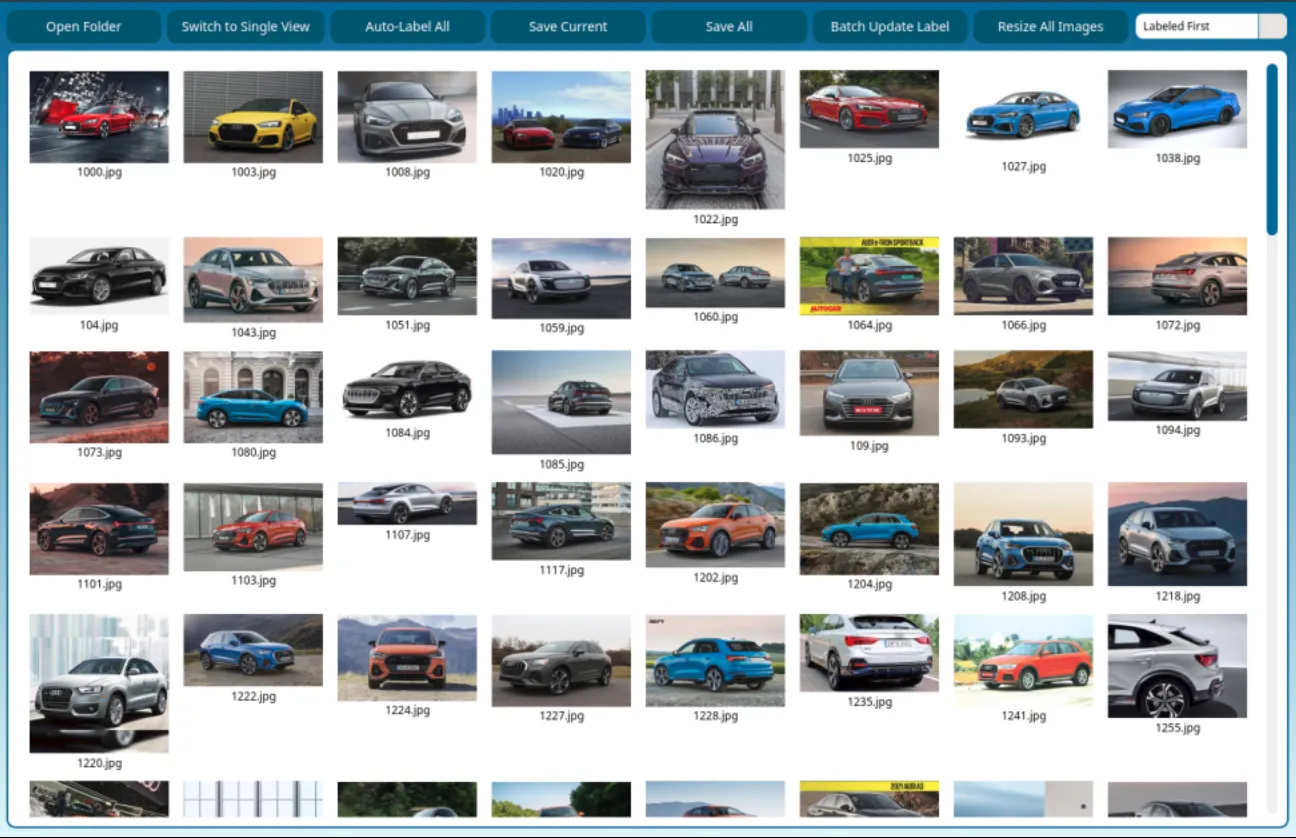
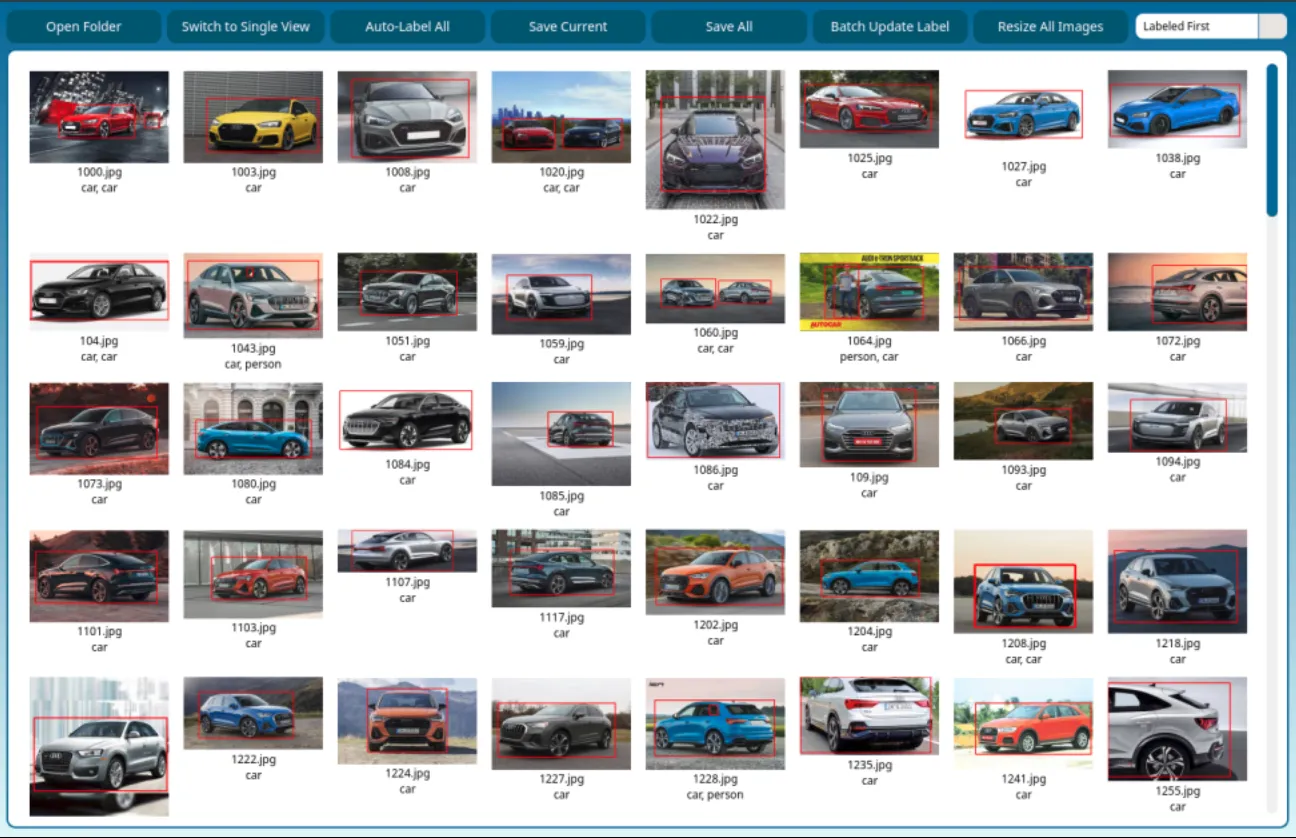
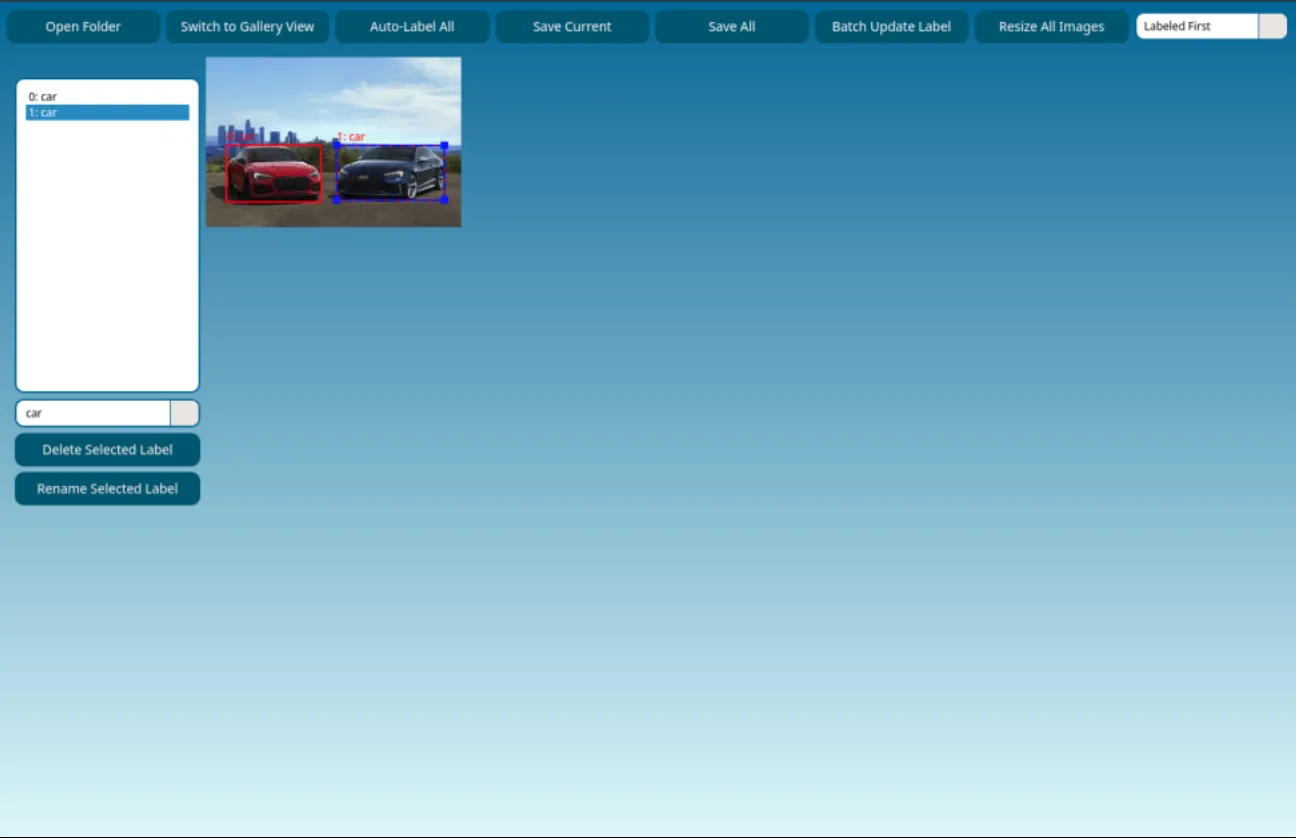
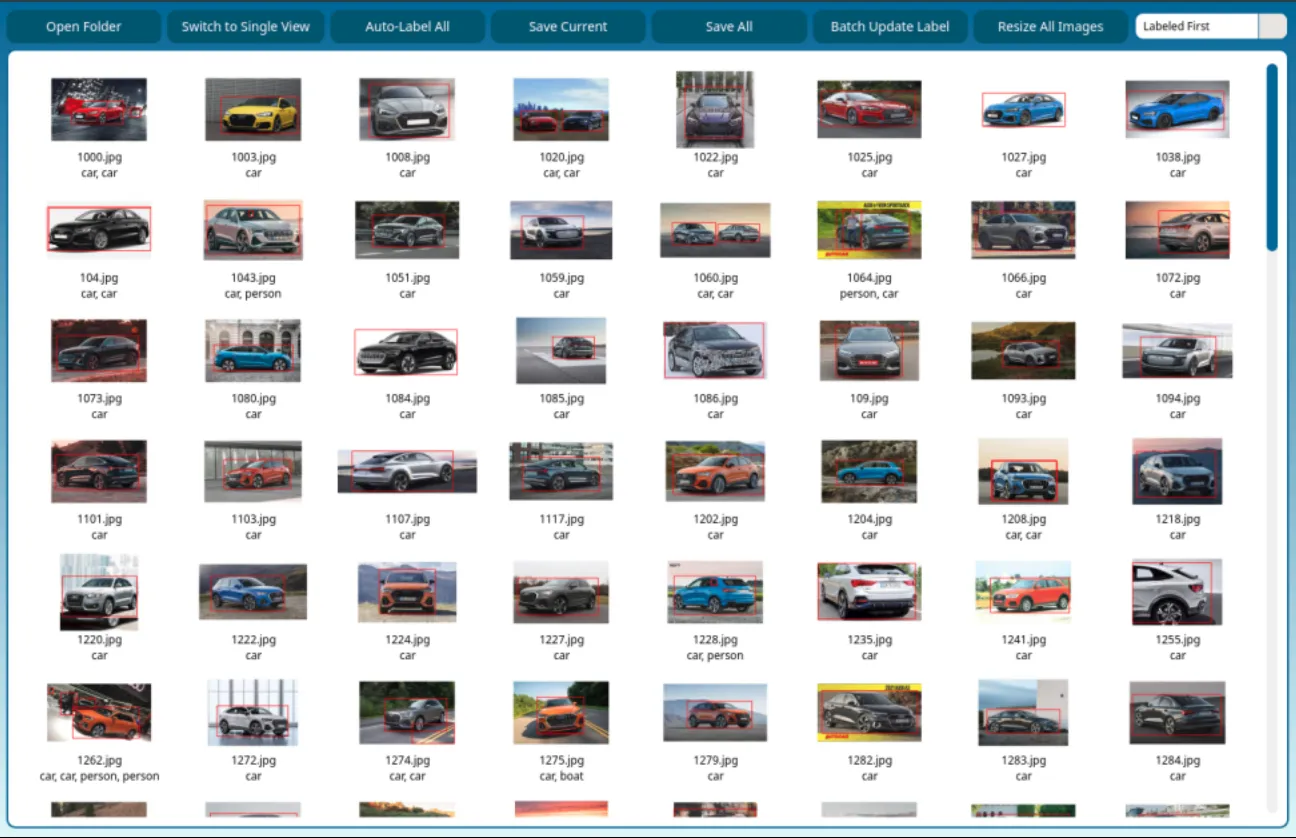
Labeling Tool
A labeling tool for intuitive annotation of image datasets with bounding boxes and classification tags, streamlining dataset preparation for computer vision projects.
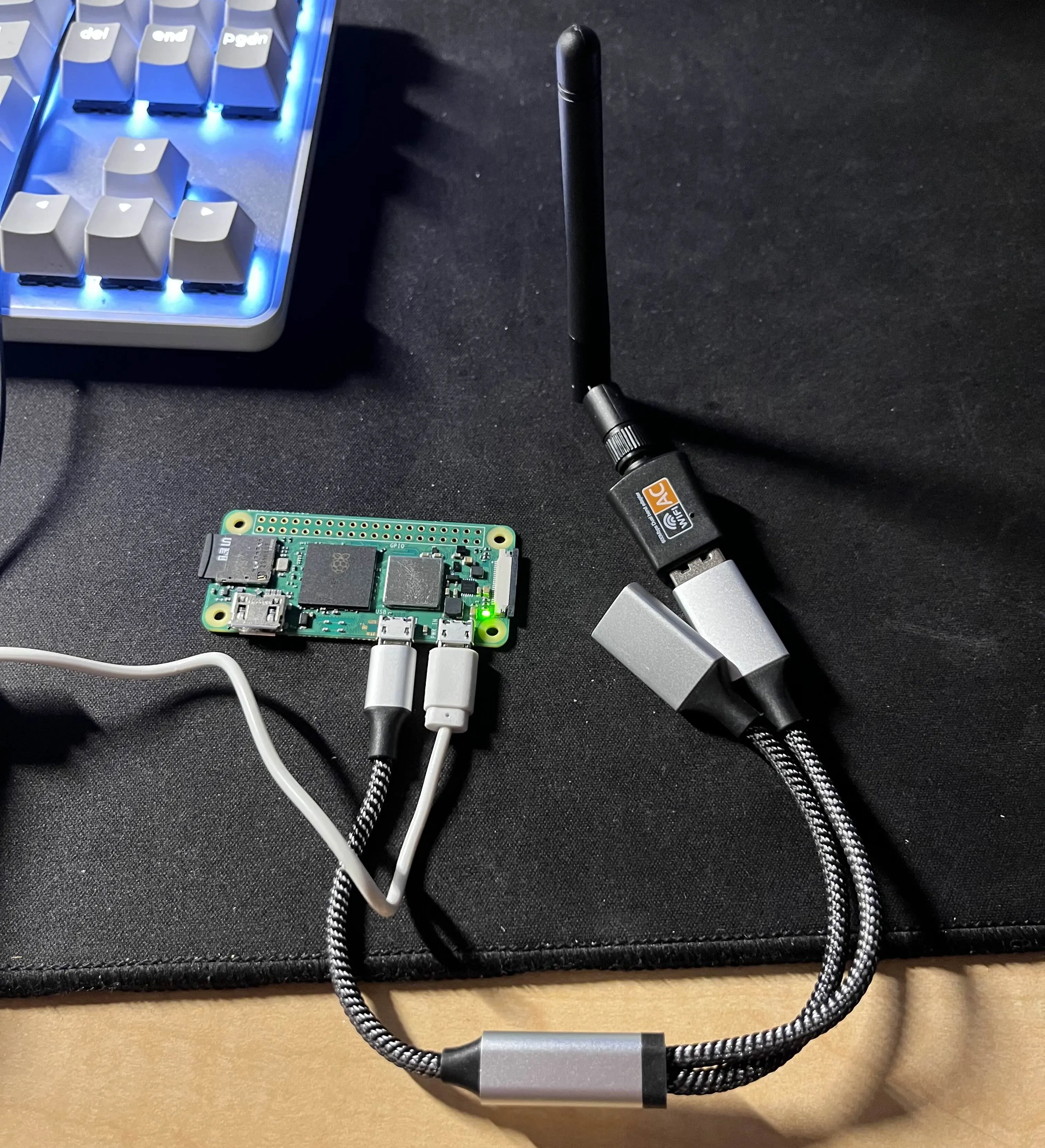
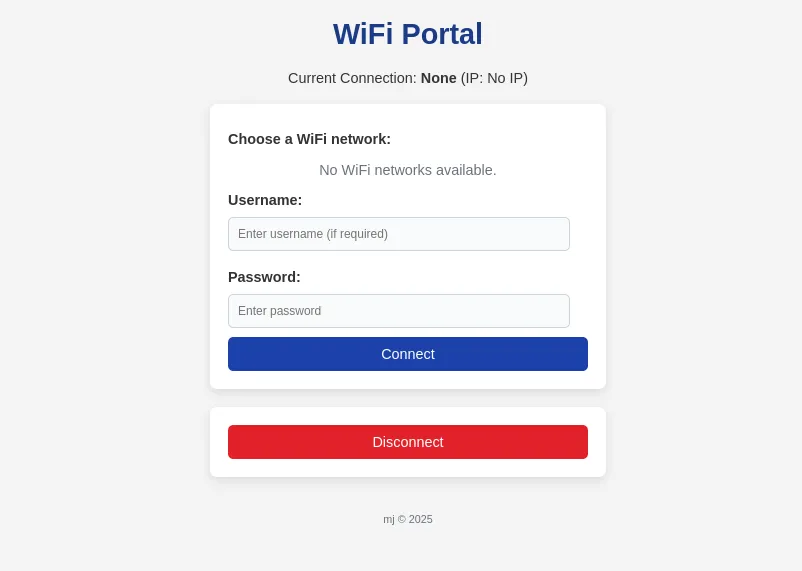
Raspberry Pi Wi-Fi Router
A customizable Raspberry Pi-based Wi-Fi router with a built-in web interface for managing connections. Supports both WPA2 Enterprise and standard WPA2 networks.
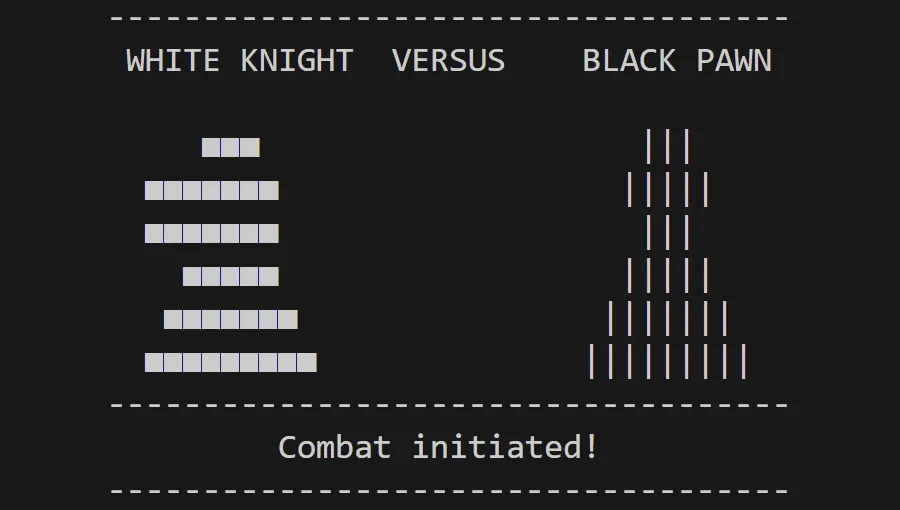
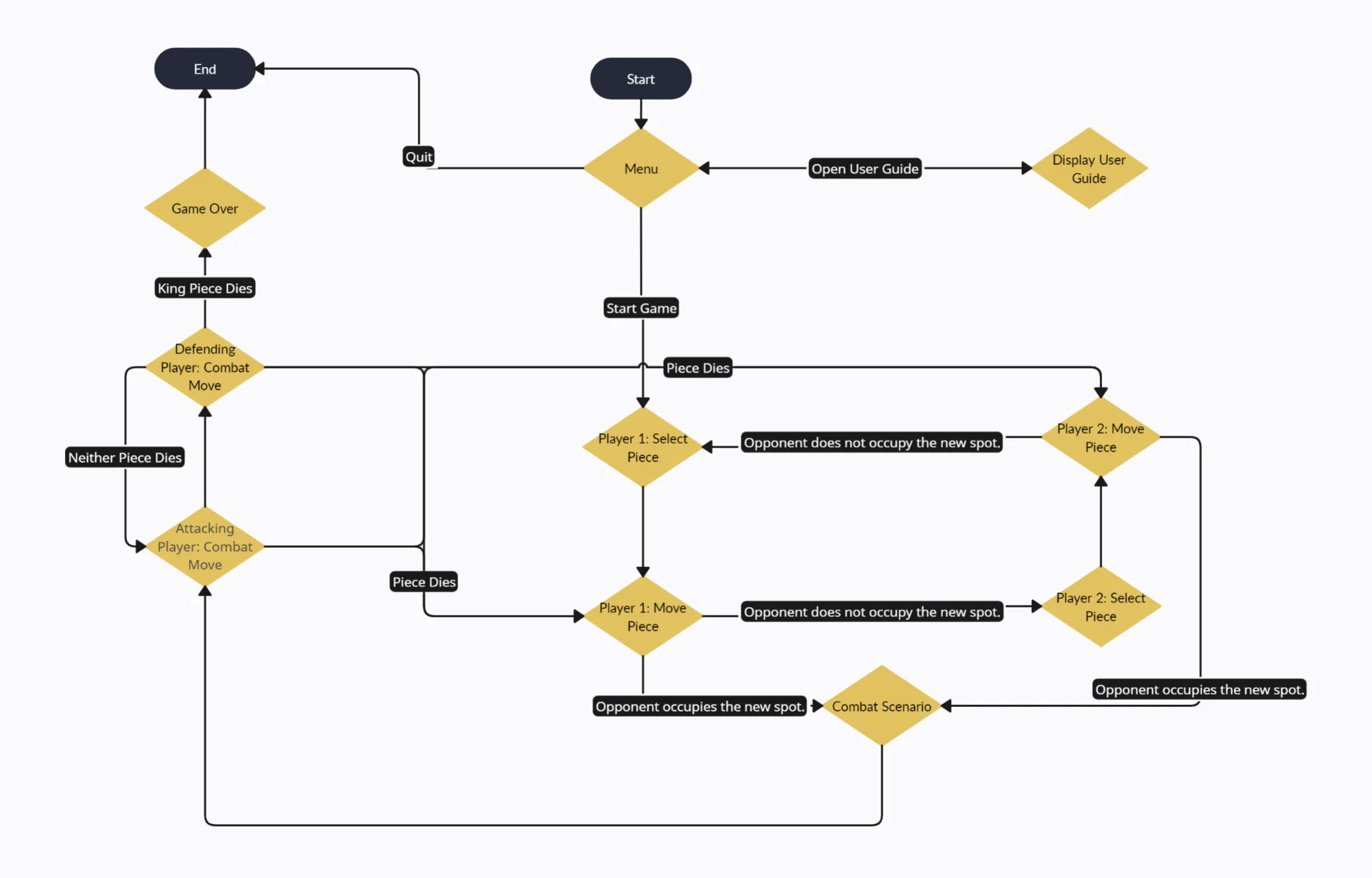
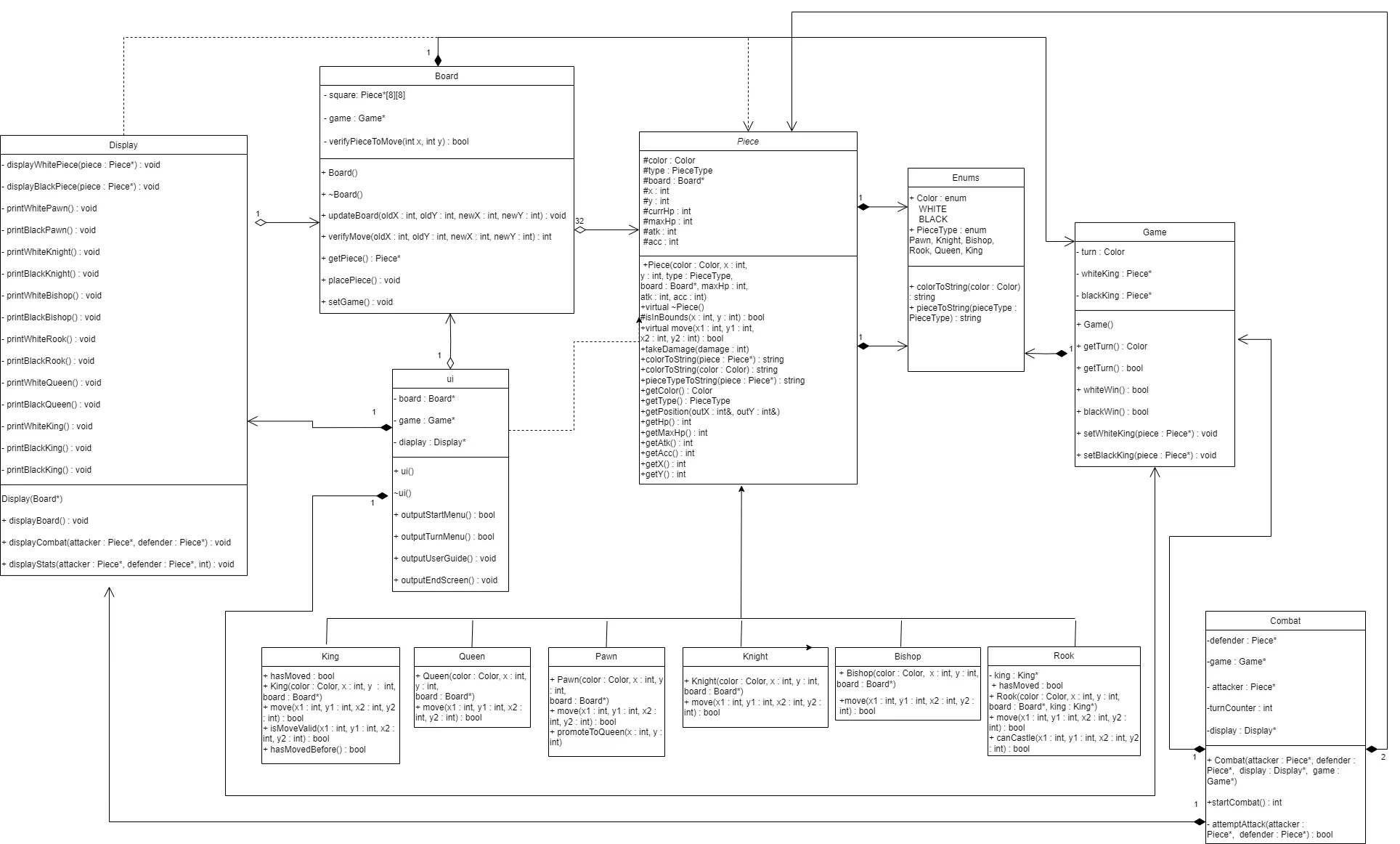
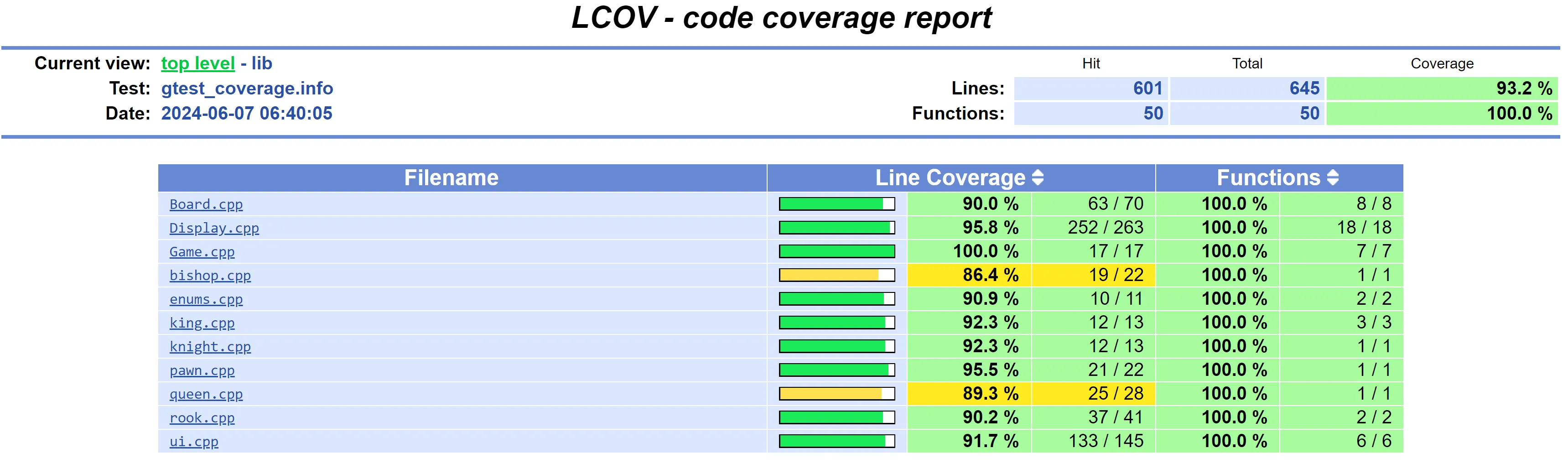
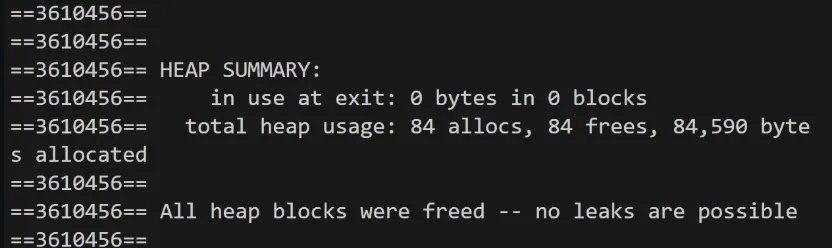
Chess Crusaders
A fully published ASCII chess fighting game, implementing SOLID principles and advanced OOP, optimized with data structures and algorithms.
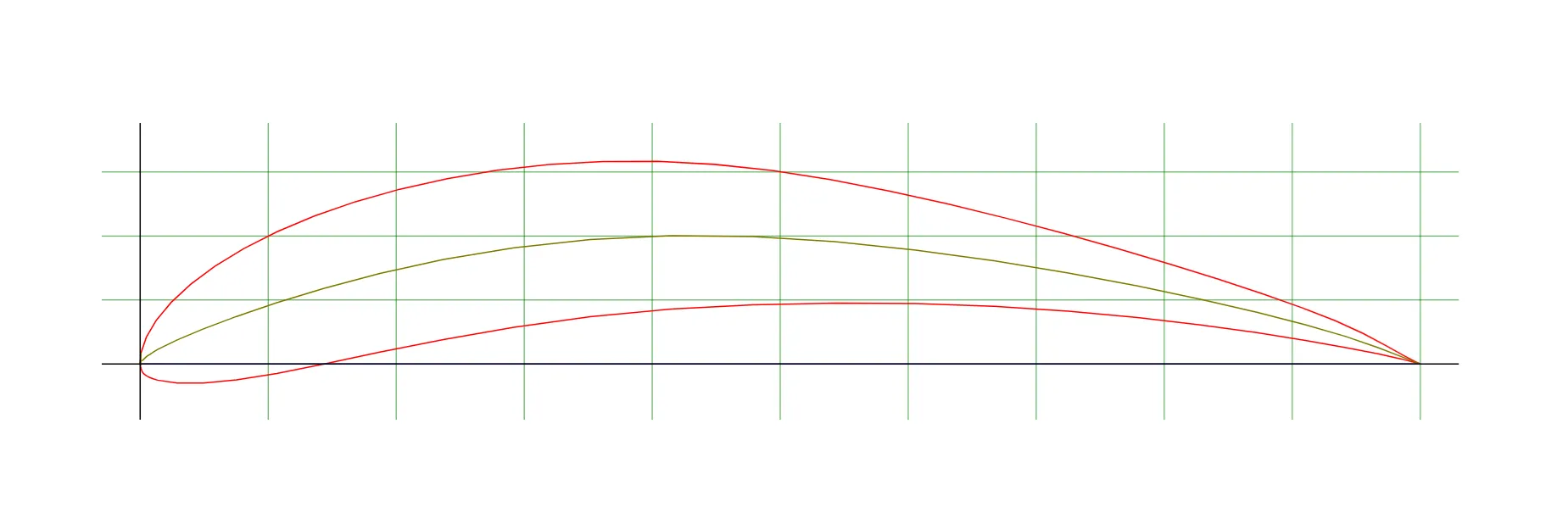
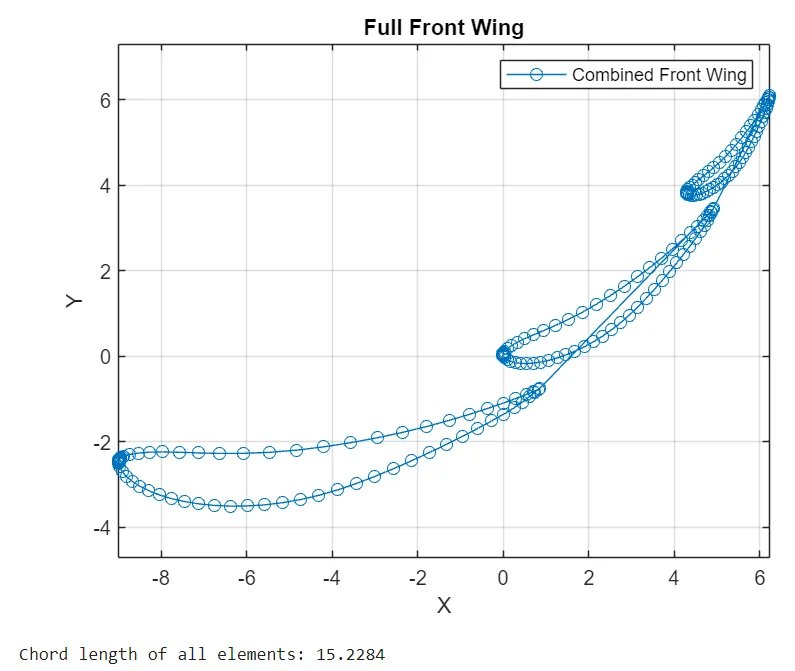
FSAE Airfoil Wing Generator
A computational tool for designing and analyzing airfoil wings for Formula SAE cars, optimized for aerodynamics and structural performance.
Mechanical Portfolio
Interact with the 3D models below to view them in detail.
V6 Engine
Full movable V6 engine assembly with pistons, crankshaft, and more.
Spiderbot
Fully defined and assembled spiderbot equipped with all MCUs, sensors, and servos.
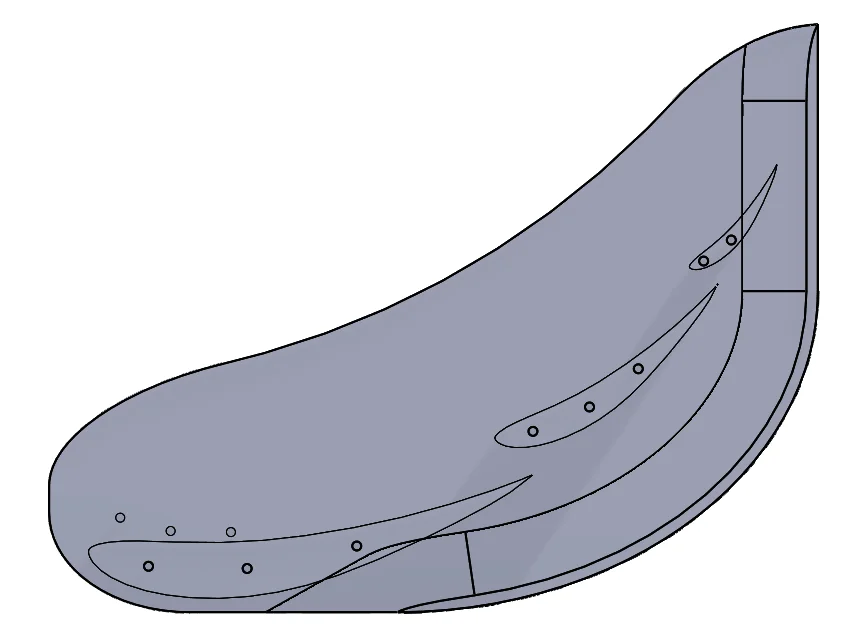
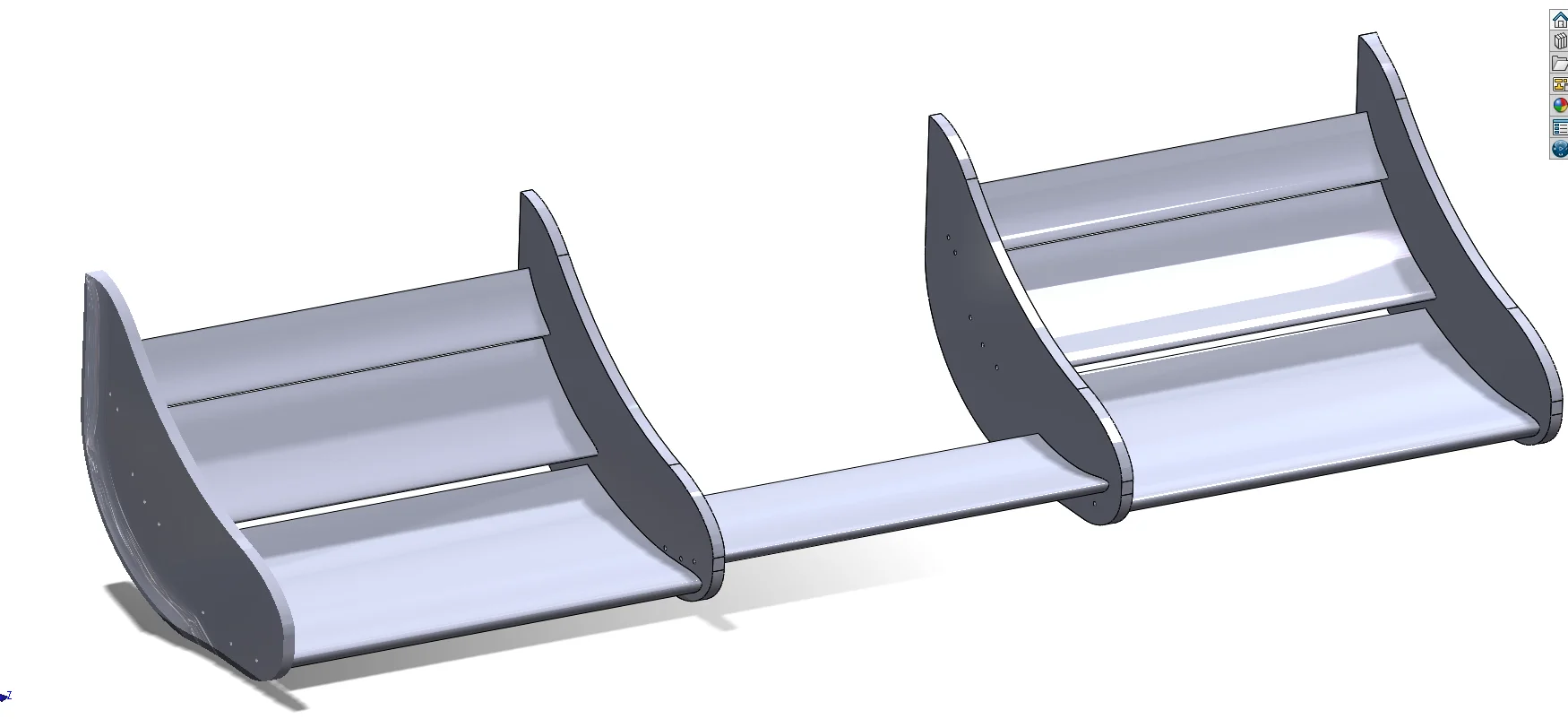
Front Wing
Front wing assembly, designed in MATLAB and Solidworks with custom airfoils (E423) and endplates.
Drone v0.1
Assembled quadrotor drone with PDB, Raspberry Pi, camera, motors, and 5-inch propellers. Includes a modular X-frame design with detachable arms.